Above the original filling of the space at the bottom of the trunk of the Atto3 is shown, with a.o. the tire ‘repair kit’.
I like to drive around with a spare tire because I drive on construction sites quite often, and so far I have had 2x tire damage because of that. And such a damage is not always fixable with a fluid repair kit.
My new spare is a home-bringer also used on a Toyota RAV4 : R17 165/80/17 tire and a 5X114.3X60.1 rim with the same circumference, pitch and center hole as the BYD Atto3. The RAV4 weighs a bit more than the Atto3, so it should be fine.
At the bottom of the trunk the available space for a home-bringer is only 57 centimeters in diameter for a spare tire.
This means that the spare tire will be slightly higher mounted, on a mounting bracket. Under the spare tire there is then room for the jack and the likes.
The trunk cover had 2 positions, and this shelf at the bottom of the trunk therefore only comes to one possible mounting depth, i.e. in the highest position.
So- that’s how I positioned the spare tyre (from a Toyota RAV4, 17 inch) in the boot of the car. Not the nicest way but it works OK. The shelf that comes with the car can be positioned in the upper position no problem. I added a hydraulic mini jack and a wheel bolt wrench, since this was not part of the car’s accessories.
To hold the tire down, I made a mounting bracket from square iron tubing 20-20-2mm with 3 holes: 2 to tie it with M6 nuts to 2 of the 4 already available threaded M6 bolts and 1 hole in the center of the square stock to carry an M10 bolt going UP with a washer and a wing nut. The M10 bolt goes through 1 of the boltholes of the rim. I welded the M10 bolt in the center of the square steel and made the rear part almost flush with the square steel. Then, I mounted the bracket down on the floor of the boot with 6mm tubed M6 IKEA nuts that I had lying around from an old double children’s bed. These nuts are about 15mm in length with a large flathead on top and an Inbus insert in the top. This is ideal, because the M6 steel bolt-ends that stick up from the boot are only around 18mm in length and don’t stick through the 20mm square stock.
BTW: I shortened the 2 not-used standing M6 bolts to the height that they just carry one M6 nut each, might be useful in the future.
After the spare tire was mounted and secured with the washer and M10 wing nut on the bracket I used the bag that came with the removable part of the pulling rod to store all loose components like the puller for the plastic boltcovers that are mounte in the wheels and o on. This is placed in the inner part of the spare tire.
Unfortunately, I forgot to take some pictures of the setup of the spare tire mounting bracket, will do that when I can and present this here, later!
DIT ARTIKEL IS AANGEPAST NAAR AANLEIDING VAN DE SOFTWARE UPDATE VAN 20 FEBRUARI 2023!!
Mijn Atto 3 doet het heel erg goed, geen problemen of gekke dingen gehad vanaf midden november 2022 tot nu, 3 februari 2023. En ik verwacht ook geen problemen te krijgen met de auto..
Op werkdagen rijd ik altijd 100 tot 200 kilometers met de Atto 3 en daardoor is mijn 12Volt accu altijd geladen.
De 12V accu laden doet deze elektrische Atto 3 alleen wanneer de wagen is gestart.
Als de wagen niet is gestart wordt de 12V accu niet geladen en kan deze langzaam leeglopen, zelfs wanneer je netjes aan de laadpaal bent aangesloten.
Het gaat dus om de mate waarin die 12Volt accu leegloopt, want er zit in de Atto 3 maar een relatief kleine accu, omdat er geen zware startmotor hoeft te worden bediend.
Ik heb daarom als voorzorg begin februari een meetsysteem geplaatst op de 12 Volt accu. Daarmee meet ik de spanning en ontlading.
De ontlading leek wat aan de hoge kant te zijn maar ik heb hier zelf nooit problemen mee gehad.
Onderstaand kun je mijn ervaring en meetgegevens lezen voor en na de laatste software-update van 20-2-2023.
ERVARINGEN NA DE SOFTWARE UPDATE VAN 20-2-2023:
Dit is de update van 20-02-2023 (boven).
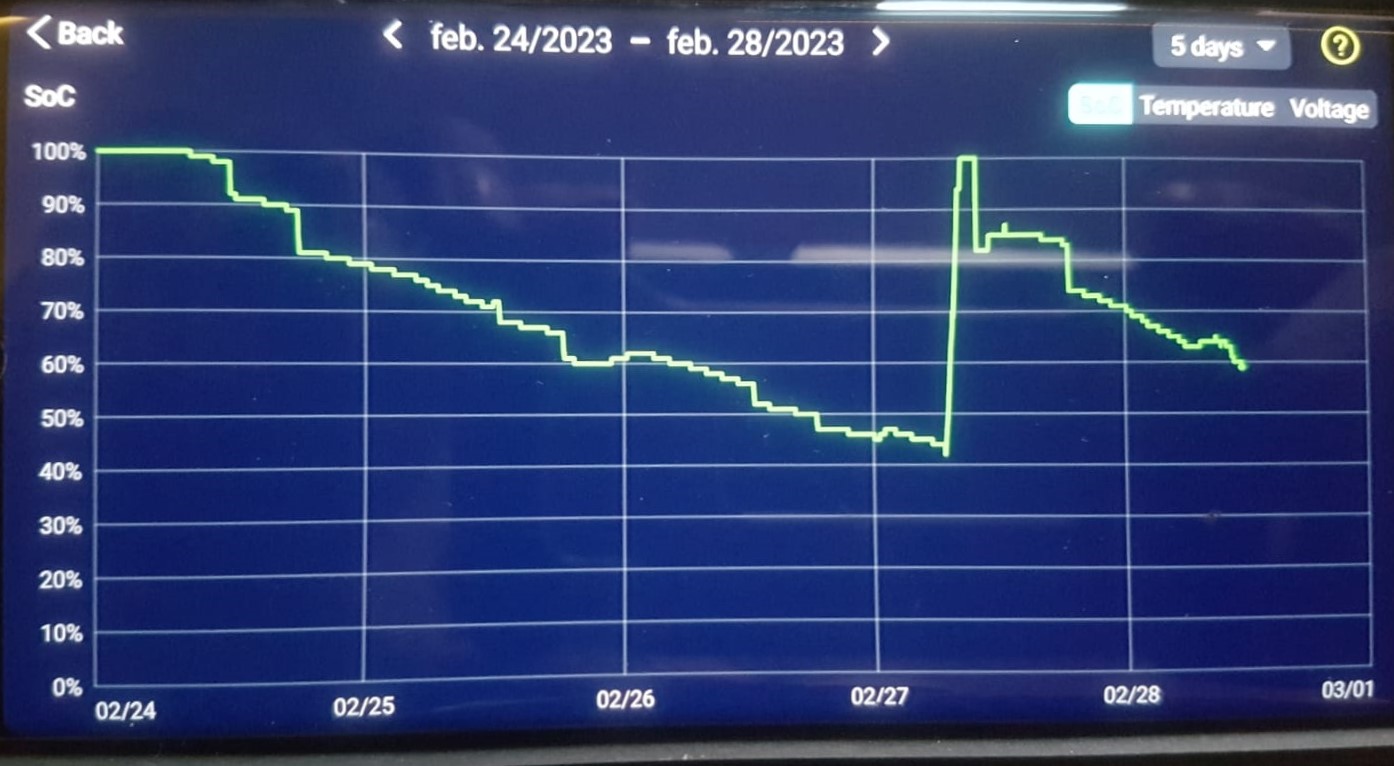
Links op bovenstaande SOC (state of Charge) uitdraai van mijn Batterij meet systeem zie je dat de accu VOOR de software update nog behoorlijk terugloopt in 1 dag.
Maar NA de software update die ik om 8 uur 20-2-2-23 heb gedaan loopt de accu veel minder en veel minder snel terug.
Dat kun je heel goed zien in bovenstaand plaatje van 3 dagen met links de oude software en rechts de nieuwe software.
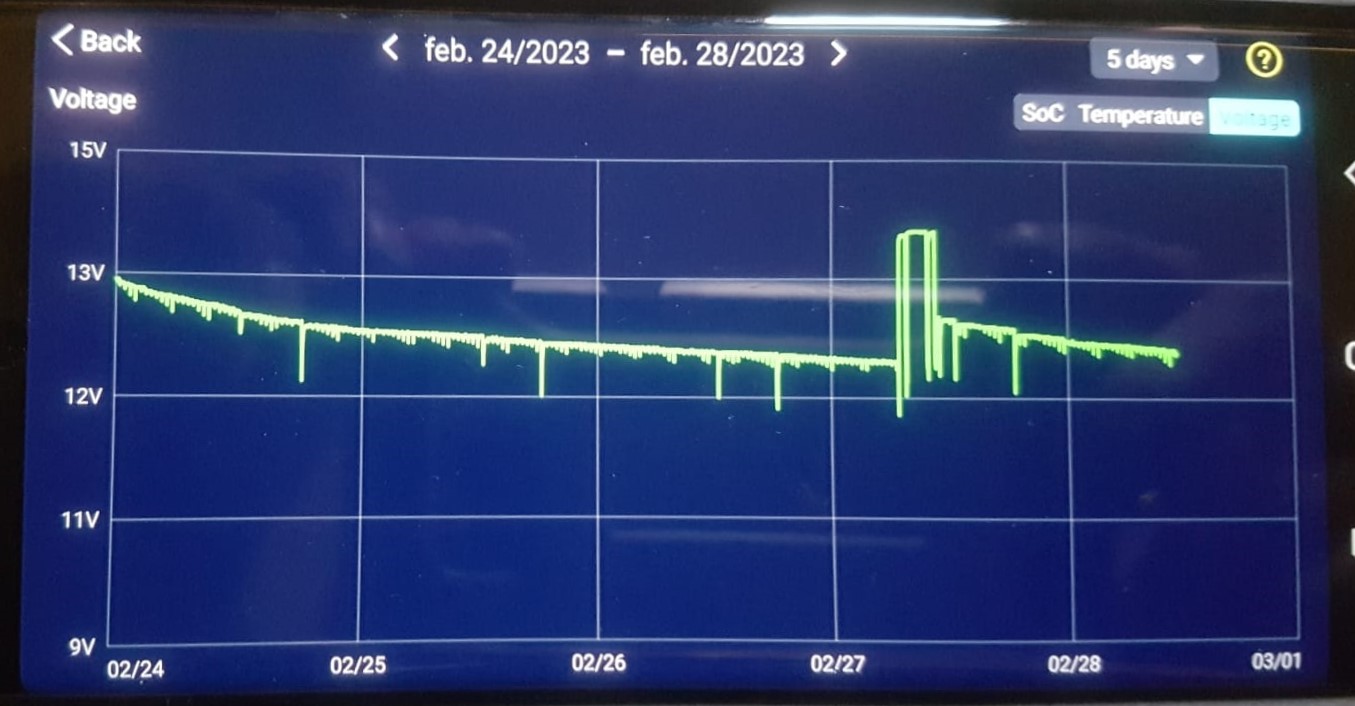
En dit is het spanningsoverzicht, dit geeft nog duidelijker weer wat er precies is veranderd.
Mijn conclusie is dat de 12 V accu na deze update minders nel zal ontladen en daardoor startproblemen veel minder zullen voorkomen, als dit überhaupt al zal voorkomen.
Het oude artikel over het hoe en waarom van de 12Volt accu ontlading met grafieken en toelichting is hieronder nog beschikbaar:
Mogelijke problemen wil ik graag voorkomen. Daarom heb ik o.a. voor een reservewiel in de Atto 3 gezorgd en heb ik een accu bewaker ( Battery Guard)) op de 12 Volt accuspanning gemaakt.
Geloof het of niet, maar de 12 Volt accu is erg belangrijk in de EV omdat alle boordfuncties worden verzorgd vanuit die 12 Volt boordspanning. Eigenlijk wordt de hoogspanning tractie-accu alleen maar gebruikt voor de aandrijving van de wagen.
Alles wat je verder ziet en dat beweegt of geluid maakt, alles wordt met die 12 Volt aangedreven. Ook bijvoorbeeld de stuur- en rembekrachtiging, warmtepomp (airco), stoelverwarming, alle ventilatoren en ja, zelf het Batterij management Systeem (BMS) van de aandrijfaccu wordt gevoed vanuit de 12 Volt spanningsvoorziening.
Dus-wanneer die 12 Volt accu leeg is doet werkelijk niets het meer.
Je kan dan vaak zelfs niet instappen, tenzij je ook een gewone sleutel bij de auto hebt gekregen. De BYD Atto 3 heeft dacht ik gelukkig zo’n sleutel, hoewel ik eigenlijk niet meer weet waar ik die heb gelaten. Vast nog in het dealermapje. Hmm. toch maar aan de grote sleutelbos doen en niet in de auto laten liggen.
Ik heb op Youtube een keer gezien hoe dat werkt bij een oud model Tesla S, wanneer de 12V accu leeg is. Er zitten dan trekdraadjes onder de auto om de motorkap te kunnen openen en de 12V accu te laden, daarna kun je de portieren weer bedienen.
Ik ga voor mijn Atto 3 een standaard laadkabeltje onder de auto maken zoals ik ook bij mijn motorfiets heb gedaan. Dan kun je in ieder geval gemakkelijk de accu laden. Wanneer je tenminste een passend kabeltje hebt naar de (externe) acculader.
Ik heb in ieder geval sinds kort een mini jumper pack 12Volt achterin liggen. Daarmee kun je altijd onderweg een lege accu jumpen en starten. Die packs lopen niet leeg want het zijn Lifepo accu’s. Minimale zelfontlading dus.
Een Batterij meet systeem op de 12V accu
Uit voorzorg heb ik een Battery Guard met bluetooth op de 12V accu gemonteerd. Via bluetooth kun je via de app diagnosesignalen laten pushen naar je telefoon maar je kan ook zelf op elk moment zien wat de status van de accu is. Je moet natuurlijk wel binnen het bluetooth bereik van het apparaat zitten van ca. 5 meter.
Deze Battery Guard is goedkoop en gemakkelijk te monteren. Kost zo’n 20 Euro en het houdt altijd de spanning bij van de accu zodat je dat wanneer je wilt kan uitlezen met je telefoon. Daarnaast geeft ie alarm via de app op je telefoon wanneer de accuspanning te laag is of te laag is geweest. Je kan er ook grafieken uit halen en/of bekijken.: Op deze manier heb je tijdig door wanneer je accu aan vervanging toe is!
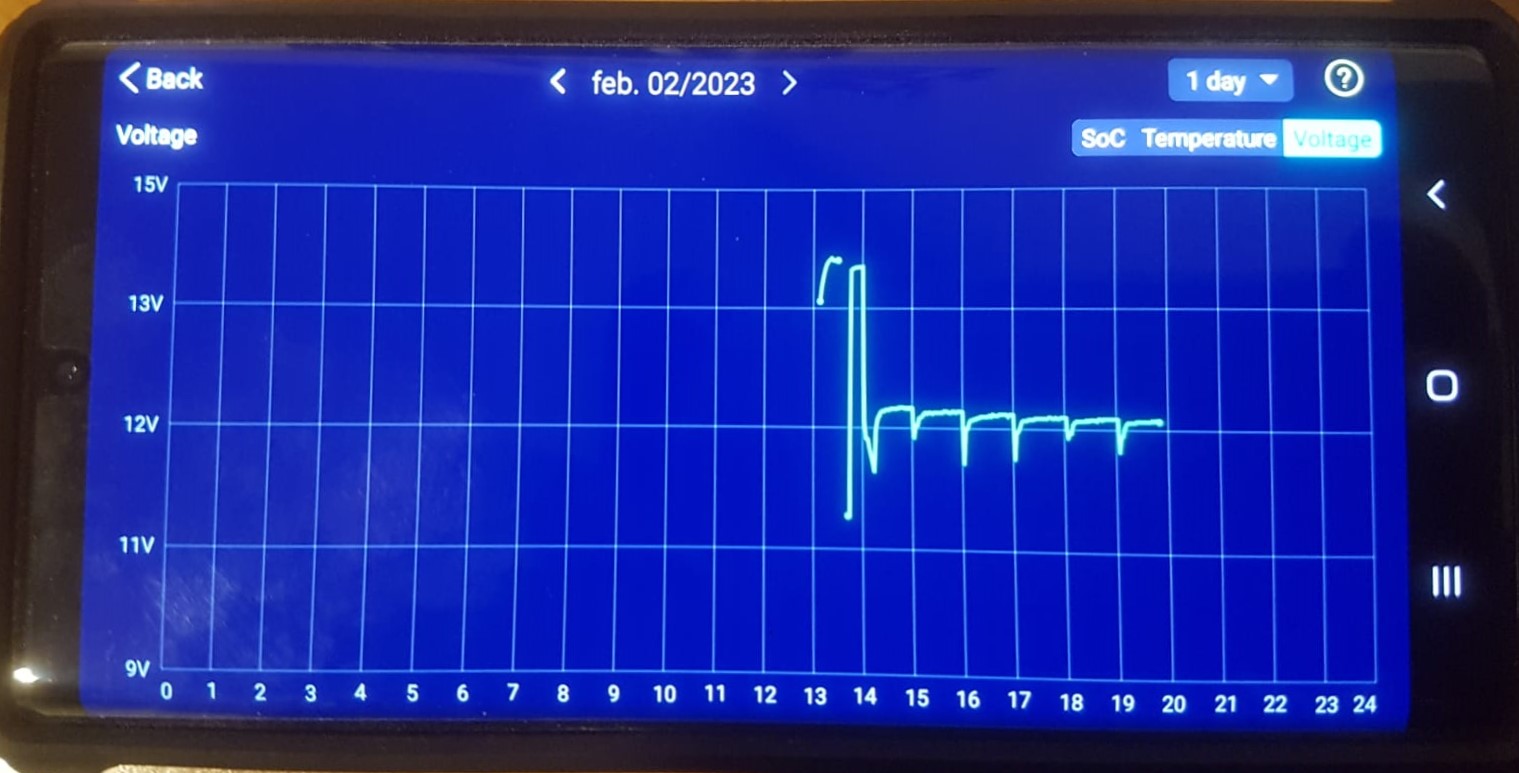
Boven zie je het dag-overzicht van de spanning van de 12V accu van mijn Atto3 nadat ik deze heb gemonteerd om 13:00 uur, 2-2-2023. (opgenomen om 20:00 uur). De eerste kleine piek helemaal links is van mijn reserveaccu, in mijn garage. Die telt niet mee. (12:00-12:30)
Wat mij opvalt is dat de auto de 12V accu laadt met 13,8 Volt (linkse piek terwijl ik de auto heb gestart) en dat de auto in rust met pieken elk uur de 12V accu iets ontlaad. 13.8 Volt lijkt aan de lage kant als laadspanning voor een loodzuur accu maar is in principe wel OK, als de accu inderdaad al redelijk is volgeladen. Dat verschilt per type accu.
Het is een SCEM-3703010 accu en er staat nog een nummer op: 38B20L. Het is volgens de sticker een gewone lood-zuur accu van 35 Ampère-uur (Ah). Deze accu kost circa 75 Euro van o.a. VMF.
“Deze accu wordt ook vaak gebruikt in de Suzuki Vitara, Kia Picanto, Honda Jazz, Nissan Figaro, enz. bijvoorbeeld ter vervanging van de originele accu Suzuki 38B20L”.
Nog even over de ontlading van de accu wanneer je niet met de wagen rijdt: Ik ben natuurlijk heel benieuwd wat de reden is dat die ontlading elk uur als een soort piekbelasting optreedt. Ik heb inmiddels alle communicatie in de wagen een nachtje uitgezet (sim/OTA, wifi, bluetooth) om te zien wat het effect daarvan is. De auto staat altijd ’s avonds en ’s nachts aan de lader en overdag rijd ik meestal ca. 100-200 km. Genoeg om de accu te laden, lijkt me. Volgende ochtend was er geen enkel verschil met daarvoor dus heb ik de communicatie maar weer aangezet.
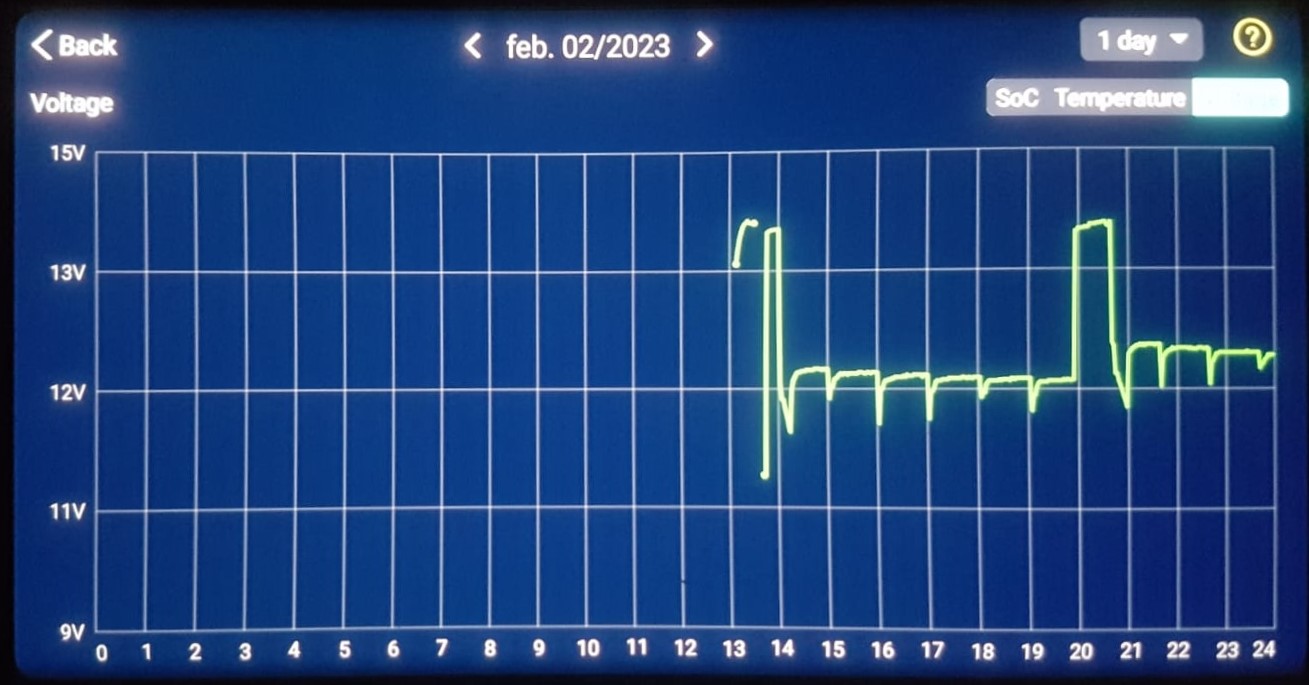
De spanningscurve was zonder wifi, bluetooth en OTA SIM zo:
En (onder) vanaf 07:00 uur na het parkeren 3 feb 2023 ziet het er erg hetzelfde uit met ingeschakelde OTA verbinding, en wifi en bluetooth allemaal aan.
Tussen 06:10 en 07:05 heb ik met de wagen gereden, dan laad het systeem netjes de accu bij. Dat geeft het spanningsverloop tussen 13.6 en 13.8 Volt. Daarna geparkeerd en dan ontlaad de 12V accu dus weer een beetje tussen 07:05 en 15:20. Tijdens de terugreis naar huis tussen 15:15 en 16:05 is de 12V accu natuurlijk weer aan het opladen.
Dit weekeinde rijd ik niet met de wagen, ben benieuwd hoe het er dan qua ontladen van de 12V accu uit zal zien: Zie hieronder.
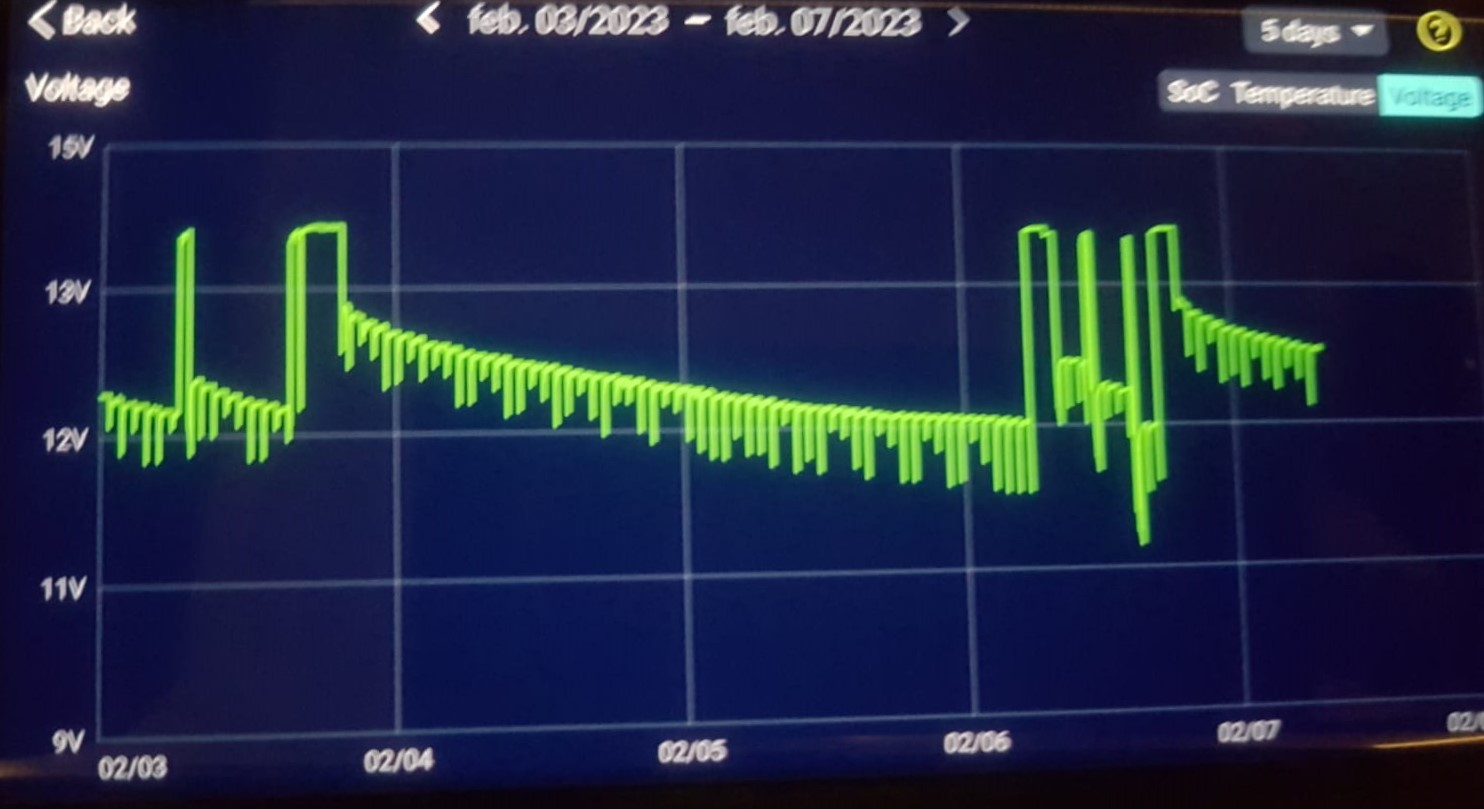
De wagen ontlaad behoorlijk en de spanning komt bijna tot 12 Volt.
Uur gereden in de middag van vrijdag 3 februari heeft de accu behoorlijk geladen en daarna ruim 2 dagen stilgestaan en ontladen tot bijna 12 Volt. Daarna een paar keer op pad geweest op maandag 6 februari en weer een nachtje geparkeerd, zoals rechts te zien is op onderstaande grafiek.
Op zich jammer dat de wagen in dit tempo de accu bij stilstaan ontlaad, maar het is allemaal nog goed genoeg om de wagen na 2 dagen weer aan te krijgen.
Geen zorgen
Ik heb met onze kerstvakantie van 2022/2023 overigens ervaren dat de wagen na 20 dagen stilstaan ook nog gewoon zonder probleem aangaat.
Dus ik maak me helemaal geen zorgen. Wel leuk om te zien wat er allemaal qua 12 Volt accugebruik gebeurt natuurlijk.
Waarom loopt de spanningshoogte van de 12V accu eigenlijk terug?
Het is natuurlijk normaal dat een 12V accu lading verliest. Dat gebeurt al door de zelfontlading van deze lood-zuur accu’s maar ook door alle toeters en bellen die we nodig hebben bij moderne auto’s.
Er loopt in ruststand eigenlijk altijd wel zo’n 5 milli-ampere tot 20 milli-ampere vanuit de accu naar een gemiddelde moderne auto. Ik heb (nog) geen idee hoe dat bij de Atto3 zit, dat ga ik nog meten.
Mijn Volvo V70 uit 2010 had een ruststroom van 20 mill-Ampère en na een half uur liep dat terug naar 8 milli-ampere.
Dat zorgde voor een zelfontlading waarbij je na 5 tot 6 weken stilstaan de auto niet meer kon starten met de eigen accu.
Ik heb er toen voor langere stilstand een handmatig bediende massaschakelaar tussen gezet.
Dat ga ik bij de Atto 3 ook doen.
Als voorzorg, voor momenten dat we met andere middelen reizen en een paar weken weg zijn.
Die rustroom in stilstand wordt veroorzaakt door bijvoorbeeld de internet verbinding, het sleutel ontvangstsysteem, alarm enzovoorts. Gemiddeld is de 12V accu van een moderne wagen dus binnen een maand tot 6 weken zover leeg dat succesvol starten twijfelachtig wordt.
Bij een EV gaat de accu in rust bovendien nog sneller leeg, gewoon al omdat die accu relatief klein is.
Hoe laad je EV de 12V accu op?
Bij een EV zit er een DC-DC omzetter in die vanaf de hoogspannings-tractie accu de spanning terug omzet naar een laadspanning van 14-15 Volt voor de 12V accu.
In bijna alle EV’s laadt de 12V accu alleen maar op wanneer de auto is ‘ingeschakeld’.
Dat lijkt afgekeken te zijn van de ICE ’traditionele’ auto’s. Die laden ook alleen maar als de motor loopt.
Maar bij de EV moet je de auto dus hebben ingeschakeld, met de START knop of de AAN knop.
Dat betekent dat een EV in rust wel de hoogspanning tractie accu laadt en op lading houdt maar dat de 12V accu in die situatie helemaal NIET wordt opgeladen, sterker nog: De lading van de 12V accu wordt wanneer de auto in rust is en/of wordt opgeladen helemaal NIET gecontroleerd. Eigenlijk is dit heel goed vergelijkbaar met een conventionele ICE wagen.
Rijd je weinig met je EV en/of alleen maar kleine stukjes en heb je dan ook veel elektrische apparaten aan zoals 2x stoelverwarming, achterruit verwarming, verwarming en airco, ruitenwissers enzovoorts dan zul je het probleem met een lege 12V accu eerder ervaren dan wanneer je regelmatig langere trajecten rijdt.
In die zin lijkt een EV wel wat op de traditionele ICE wagens, waar een lege accu ook meer voorkomt bij gemiddeld meer korte ritjes.
De oplossing
De oplossing voor dit mogelijke 12V accu probleem bij EV’s is er (nog) niet. De eenvoudigste manier is natuurlijk om de massa-aansluiting van je 12V accu te voorzien van een massa-schakelaar wanneer je langere tijd de auto niet gebruikt. Maar ik weet eigenlijk nooit vooraf wanneer dat voorkomt.
De beste oplossing zou zijn dat er een schakeling beschikbaar komt die de accu automatisch afschakelt net zoals met een massaschakelaar maar dan wanneer de accuspanning onder een kritische waarde komt.
Dan kun je daarna nog wel starten maar loopt de accu niet verder leeg.
Misschien toch maar zelf zoiets ontwikkelen… of misschien bij Aliexpress?
NASCHRIFT VAN DE AUTEUR: Met de laatste software update van 20-2-2023 lijkt er eigenlijk geen probleem meer te kunnen optreden, behalve misschien wanneer de auto langdurig niet wordt gebruikt. Dan kun je inderdaad beter de accu loskoppelen, maar het is nog onduidelijk wanneer je dat zou moeten doen.
Uit onderstaande logging blijkt dat de accu nog wel degelijk behoorlijk ontlaad.
Ik heb de wagen 4 dagen (etmalen) laten staan nadat de 12V accu helemaal vol was. Wel aan de laadpaal maar daar heeft de 12V accu geen voordeel van.
In die 4 dagen is de accuspanning gezakt naar ca. 12.3 Volt. op zich ruim voldoende om weer te starten.
Maar- de State of Charge geeft een indicatie van net boven 40% start capaciteit na 4 dagen stilstand. En persoonlijk vind ik dat onvoldoende goed.
Mijn besluit om ‘voor de zekerheid’ de massa schakelaar te installeren had ik al genomen dus dat ga ik ook zeker doen. De schakelaar komt onder de voorkant van de wagen op het schutbord, zodat ik er gewoon bij kan en de motorkap niet open hoeft. Het is een waterdichte opbouw-schakelaar die 250 Ampère aan kan, met dikke massakabels eraan voorgemonteerd.
En ik ga er van uit dat ik de massaschakelaar alleen ga gebruiken wanneer we de auto langer dan 1 week niet gebruiken, zoals wanneer we met vakantie zijn en de auto ter plekke niet meer nodig hebben.
Zoals je op bovenstaande grafieken kan zien is de 12V accu ontlading na 4 dagen stilstand te veel om de 12V accu met een rit van 1 uur weer op normale (12.8-12.9V) laadspanning te krijgen. De lading is dan zoals de grafiek aangeeft maar 85%.
De ontlaadspanning direct na het stoppen met laden is dan zoals de grafiek aangeeft 85% bij 12,6-12,7 Volt. Na 1 dag staat de SOC op 60%.
Onder deze specifieke omstandigheden kan de 12V accu iets sneller ontladen dan wanneer de 12V accu volledig was opgeladen.
Elke dag een beetje meer rijden maakt de laadresultaten uiteraard beter.
NB: Alle metingen zijn gedaan in mijn parkeergarage waar de auto altijd op -2 staat, waar de temperatuur altijd tussen 8 en 15 graden Celsius ligt.
TIP VAN DE DAG:
Als je wilt voorkomen dat je 12V accu ontlaadt tijdens lange periodes waarin je de auto niet gebruikt kun je uit voorzorg het volgende doen:
Je kunt op afstand met de app je startknop aanzetten door het airco systeem op te starten. Hierdoor start ook het opladen van je 12V accu.
Dit is niet te automatiseren, maar wel een manier om actief te voorkomen dat de 12V accu leegloopt.
Ik heb dit geprobeerd, en het helpt alleen als je de A/C periode vooraf hebt ingesteld op de langst mogelijke periode.
Doe dit dagelijks (na de eerste week van niet-gebruik van de auto) en het zal zeker helpen de 12V accu te conditioneren.
Het zou ook kunnen werken als je het om de dag doet, ik heb dit niet voor alle mogelijke intervallen getest.
Doe dit alleen als je auto continu is aangesloten op een lader OF als je de auto voor meer dan 80% hebt opgeladen.
De oude vinyl vloerbedekking was inmiddels echt wel aan vervanging toe.
Het vinyl had ik destijds met speciale dubbelzijdige tape verlijmd,.
Het vinyl verwijderen ging redelijk makkelijk, nadat ik het eerst in lange stroken heb gesneden. Lostrekken , oprollen en weg ermee!
Daarna alle plakstroken eruit gewrikt en de vloer helemaal glad gemaakt met een steekmes en daarna gestofzuigd.
Vervolgens de wanden opnieuw in de latex gezet, ik was toch al lekker bezig.
De radiator gelijk mooi zwart gelakt.
Nu voel je gelijk dat er echt stralingswarmte vanaf komt!
De verwarming aan en de PVC tegels 24 uur laten wennen aan de 15 graden in de garage.
Daarna heb ik bepaald vanuit welk punt ongeveer in het midden ik de eerste rij tegels ga plaatsen. Voor- en achteraan heb ik de afstand bepaald en met een touwtje en een witte stift van voor naar achter een lijn getekend op de vloer. Daarna ben ik eerst naar volle lengte stroken naar rechts gaan leggen en daarna naar links.
Ik heb dunne stroken triplex van 5 mm dik rondom gelegd om de tegels voldoende ruimte te geven nog uit te kunnen zetten.
Het op maat maken van de tegels heb ik met de lijnzaag met houtzaagblad gedaan. Hier en daar aangevuld met de decoupeerzaag.
Alles ligt zonder verlijming.
Eerst was ik van plan alles te verlijmen met 2K vloerlijm maar dat blijkt na uitgebreid testen niet nodig te zijn.
Zowel met manoeuvreren op de tegels met de DS als met de traction blijven de tegels gewoon netjes op hun plek liggen.
Ik heb wel alle randvoegen en inrijranden met flexibel blijvende rubberkit gemonteerd en -afgewerkt.
Het triplex rondom de tegels heb ik er natuurlijk na het leggen gelijk weer uitgehaald zodat het PVC eventueel nog kan ‘werken’.
Bij het gebruik als werkvloer is me wel opgevallen dat de grijze tegels erg zwart worden.
Als ik onder/aan een wagen las gebruik ik zware lasdekens van HBM, dat werkt heel goed.
Bij het spuitwerk en impregneren van auto’s bedek ik de vloer met karton en stucloper. Dat werkt ook prima.
Voor het beschermen van mijn machines en voorraadkratjes ben ik gordijnrails rondom aan het monteren met daaraan tot aan de vloer dunne lasgordijnen opgehangen van Vevor. Zodra dat af is zal ik daarover ook een apart artikel plaatsen op deze site.
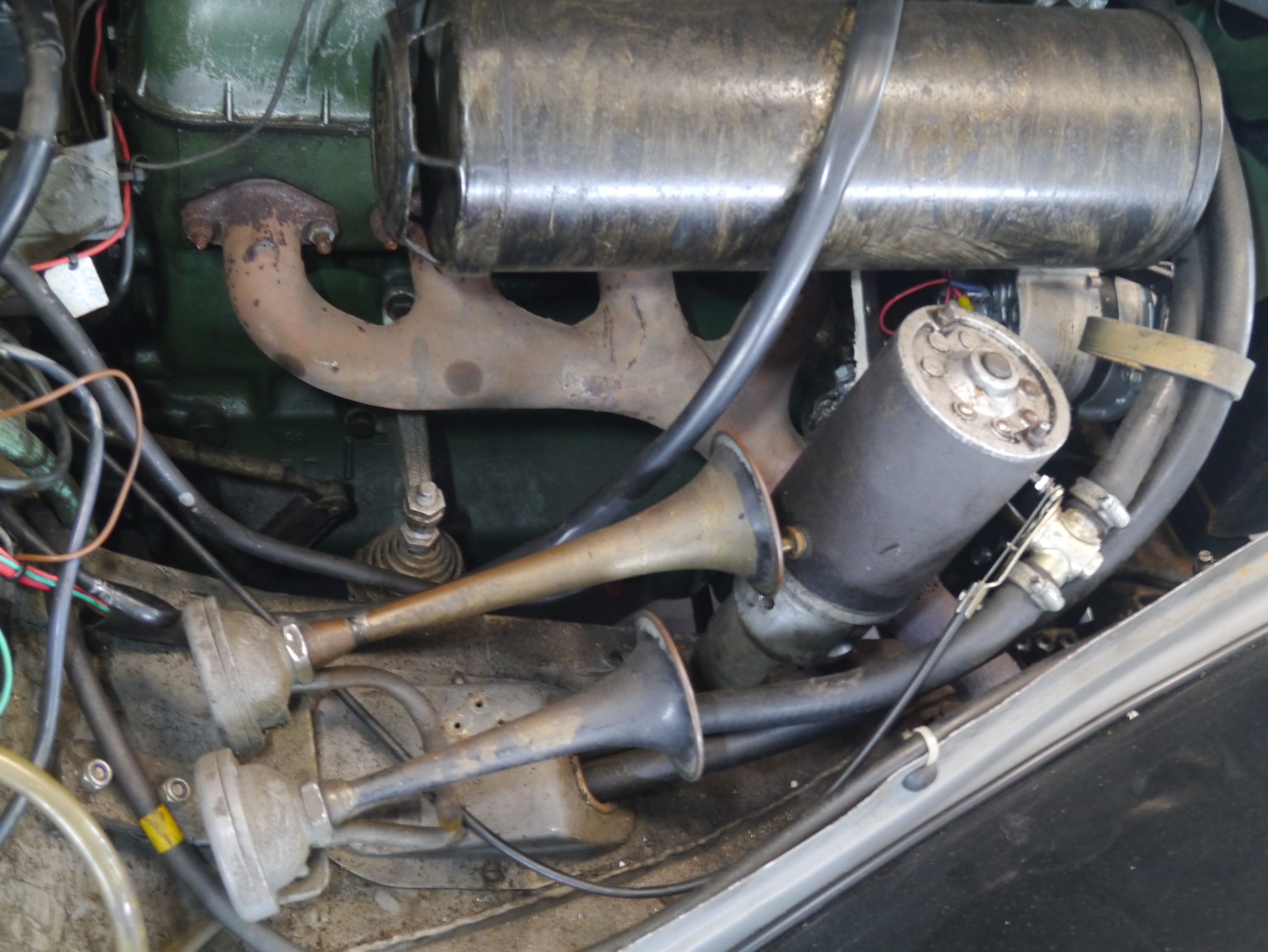
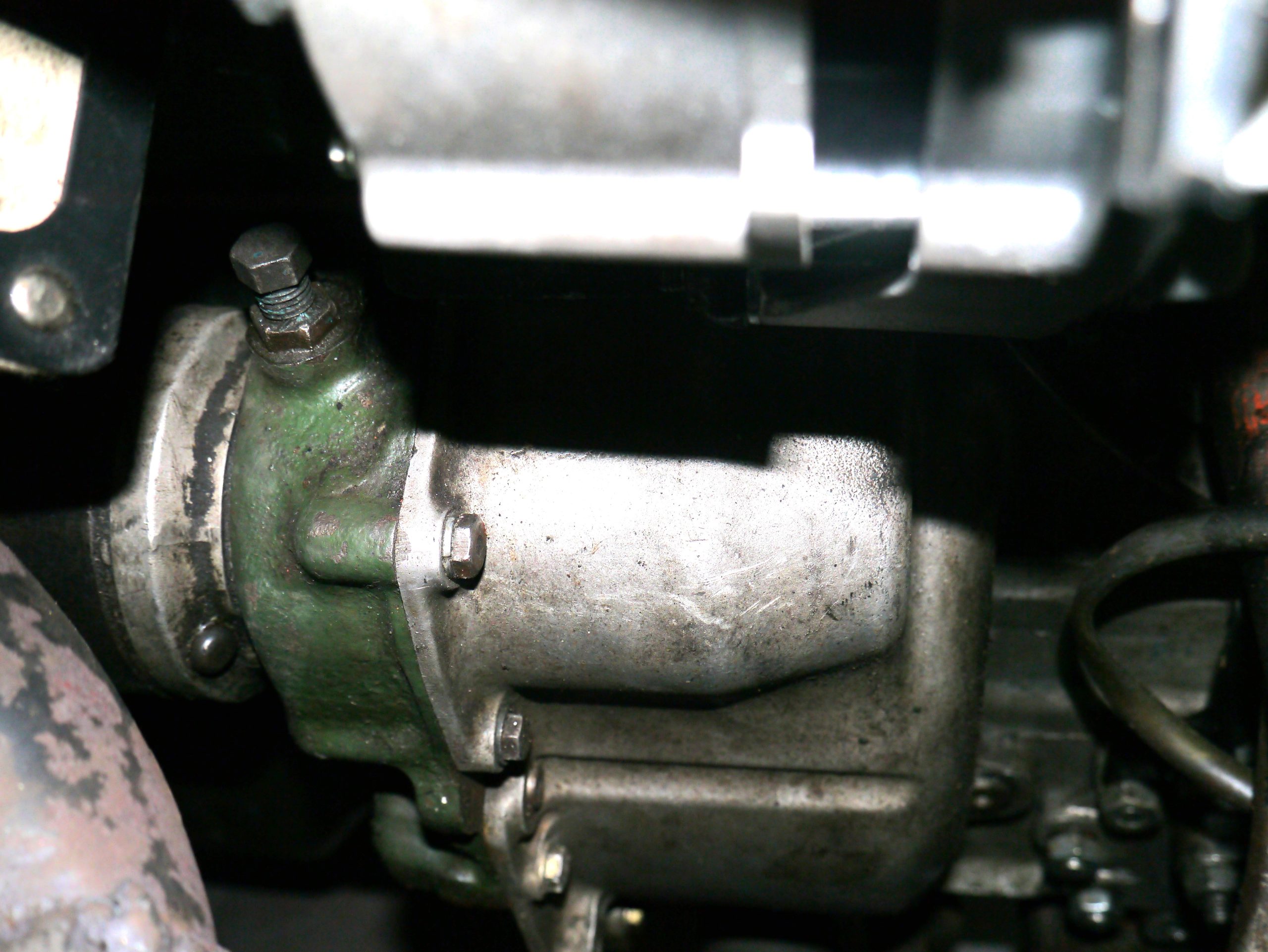
See photo below, The starter motor is under the exhaust manifold of this engine, in the same original location as on the Traction Avant 11D engine.
You can also remove the starter motor from underneath, but putting it back in is really easier from the top. Unless you have a bridge, of course.
As a possible emergency measure I mounted the original Traction Avant 6Volt starter motor, but it does not engage the Citroën ID flywheel. So quickly removed again.
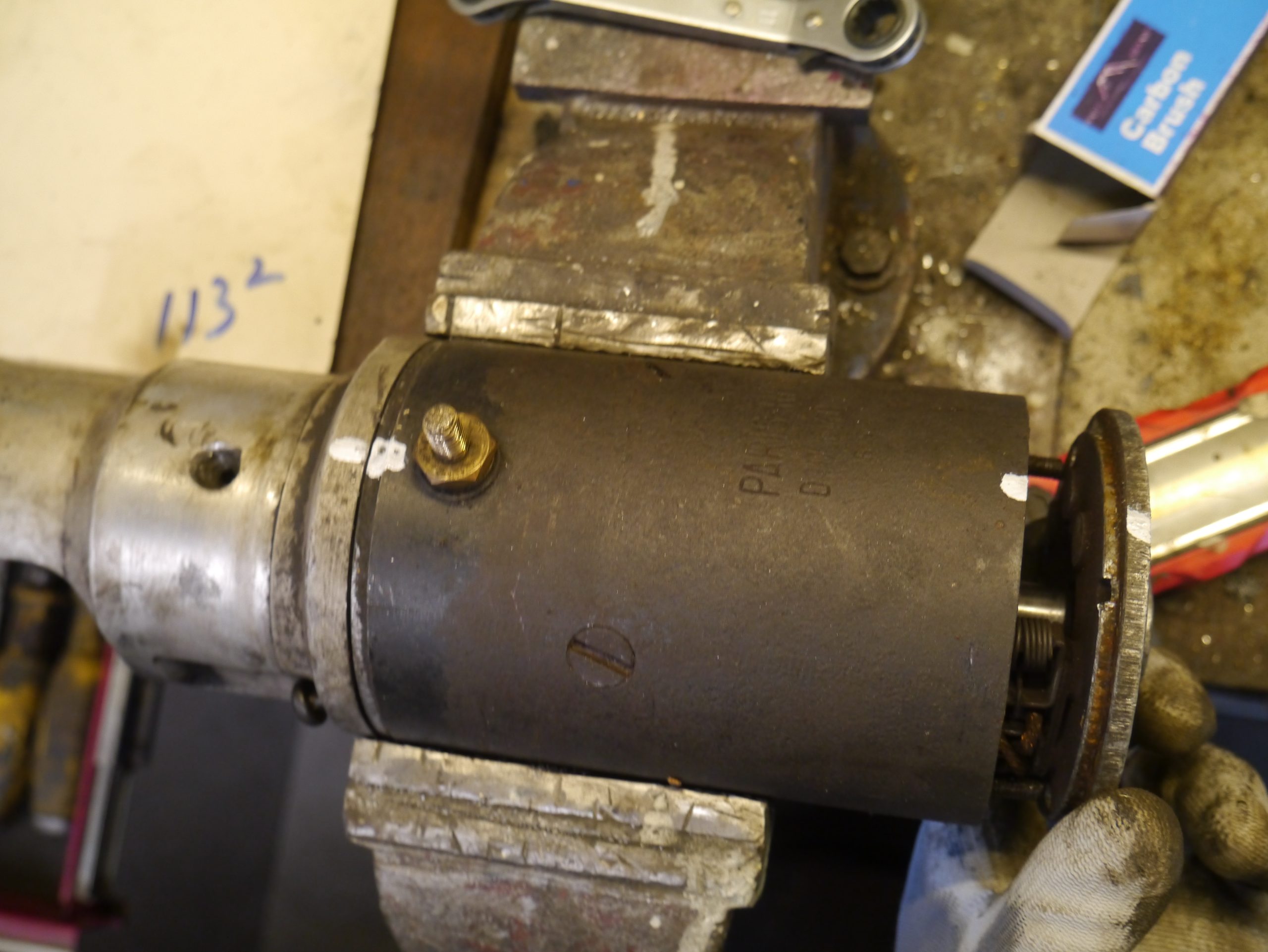
The repair:
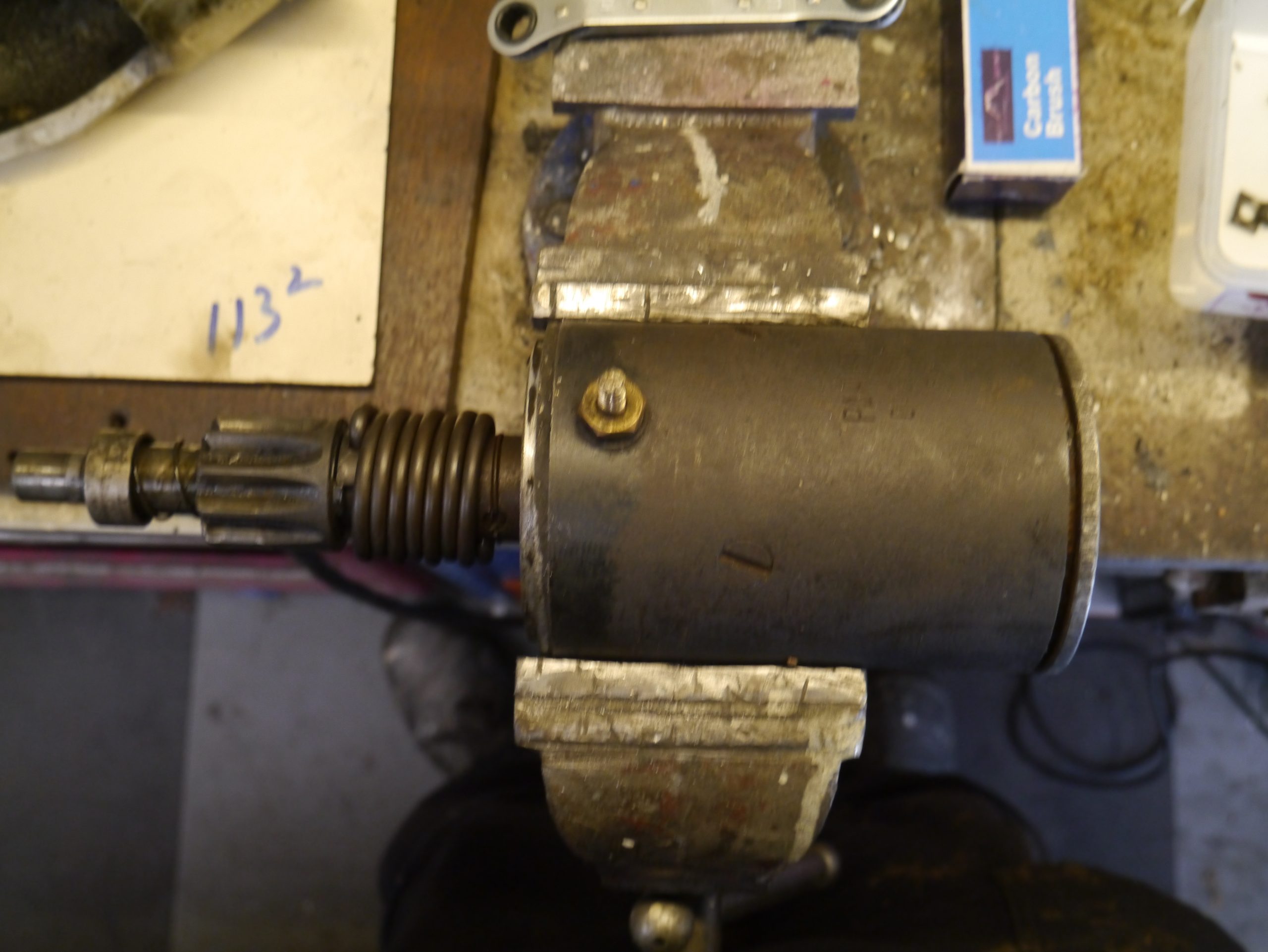
When you remove the two M6 nuts and locking plates on the back of the 12 Volt Paris-Rhone starter motor, you then slide the aluminum back including both carbon brush holders off a bit.
The carbon brush on the armature side (+) was the culprit, it was worn down pretty crookedly. It seems that one of the connecting wires had just a little too little space to allow the brush to move straight.
I then measured and ordered the carbon brushes.
The starter motor is otherwise in fine condition, the rotor and collector also look good.
The carbon brushes are the same size (about 7×17.8 mm) , and they have the same kind of soldered wire connections.
In the end it was only necessary to replace the carbon brush on the armature side, the other carbon brush which is on the minus is barely worn.
Above with the pre-soldered wires already mounted, and below AFTER soldering, after mounting the carbon brush in the carbon brush holder.
The collector of the rotor was completely flat so having it reworked in my lathe didn’t seem to make sense.
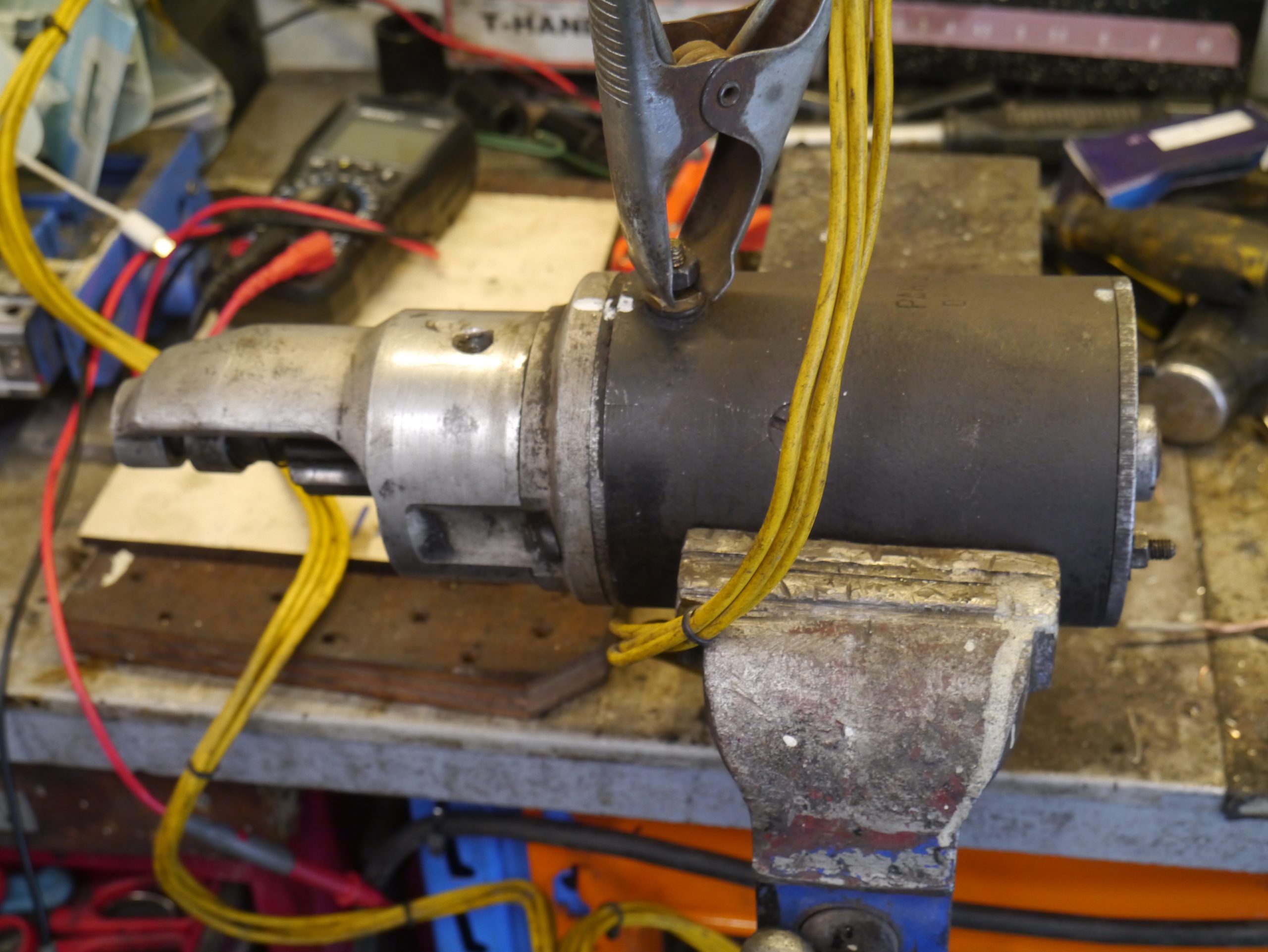
After cleaning and assembling it, I first tested everything using a small battery from my motor bike, gave everything a little grease, secured the back with the 2 locking plates and reinstalled the starter motor in the TA.
In the Netherlands, Burghof trekhaken has developed a detachable lockable BOSSTOW tow bar for the Atto3, only to be used for carrying bikes or a towbox on the ball of the bar.
Not to be used for pulling anything.
UPDATE 2023-05-13: Message received from an Atto3 driver from Belgium that the BYD Ato3 will definitely NOT get homologation for a towbar, neither in NL nor in BE. This probably means that there will be no homologation for the tow bar anywhere in Europe. In Belgium there will also be NO homologation for a tow bar for a bike carrier. In the Netherlands, the regulations are not entirely clear, but tow bars approved according to Tüv (DE) standard are tolerated as tow bars for bike carriers on cars without tow bar homologation.
The tow bar can be taken off vertically and the cable box can be pushed up, so nothing reveals the presence of a tow bar installation when is has been dismounted.
Available for deliveries end of April 2023.
Can be ordered at Burghof trekhaken.
I have the prototype mounted on my car (2023-3-30):
.
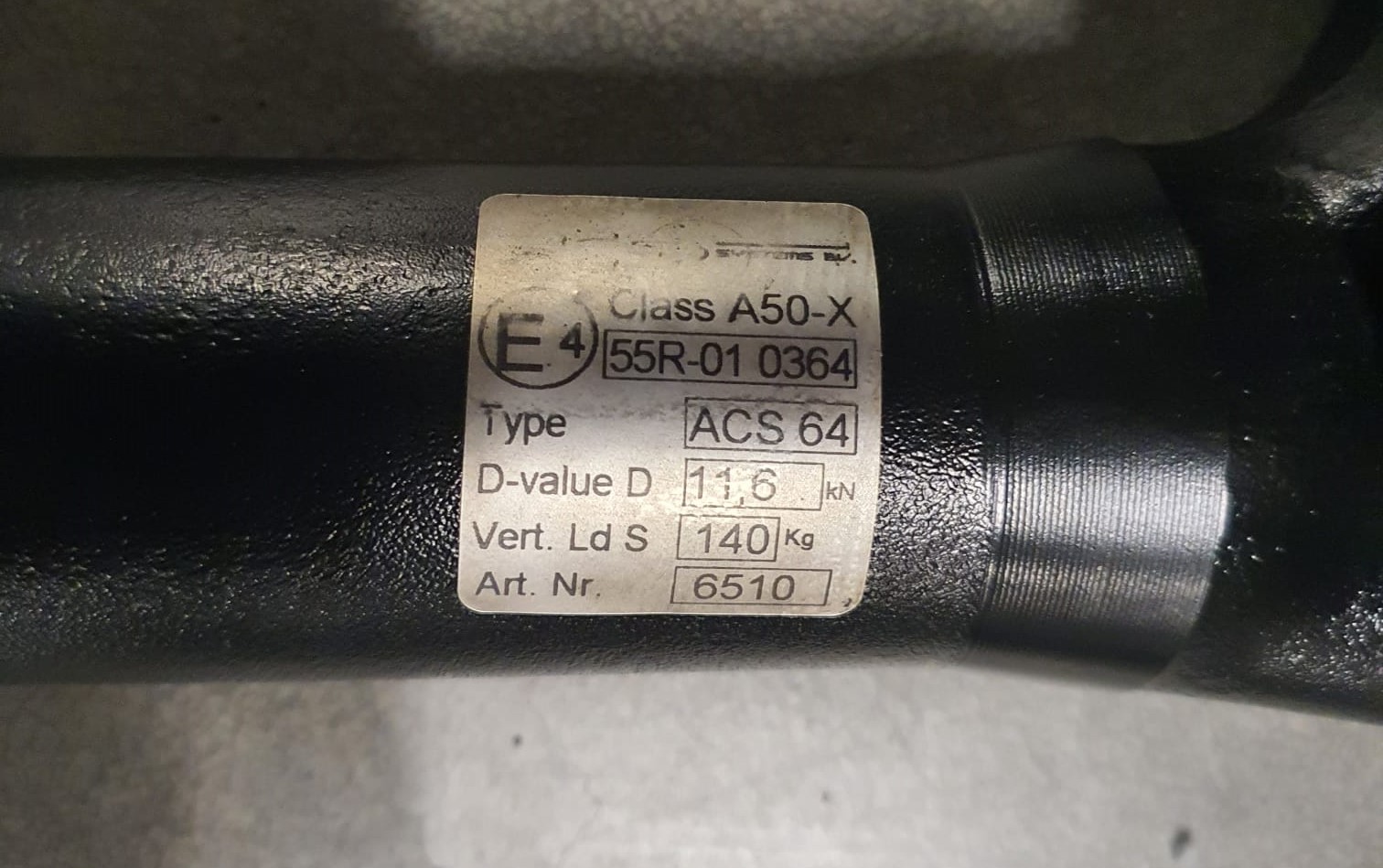
Interestingly enough, as expected I have a German Tüv allowance paper that came with the pulling bar that states that the towbar is intended only for mounting a bike carrier or a towbox with a max vertical pressure of 60kg.
AND you should know that the BOSSTOW towbar hitch as a whole is approved for pulling 11.6 kiloNewton (1160 kg) which is more than the Atto3’s (in NZ) allowed 750kg. The maximal vertical pressure that the BOSSTOW hitch can handle is 140 kg. This hitch is well-oversized which is OK by me.
I am not worried at all about the sturdiness of the hitch, it appears to be a strong enough construction that is capable of handling much more than I will ever need.
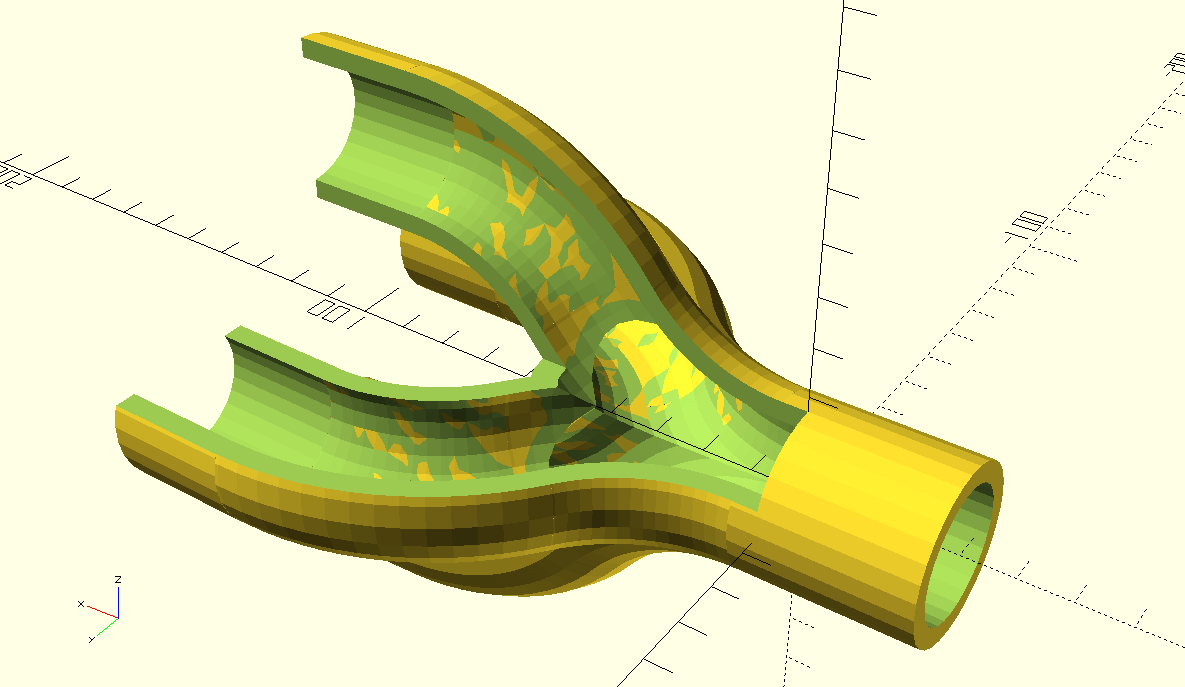
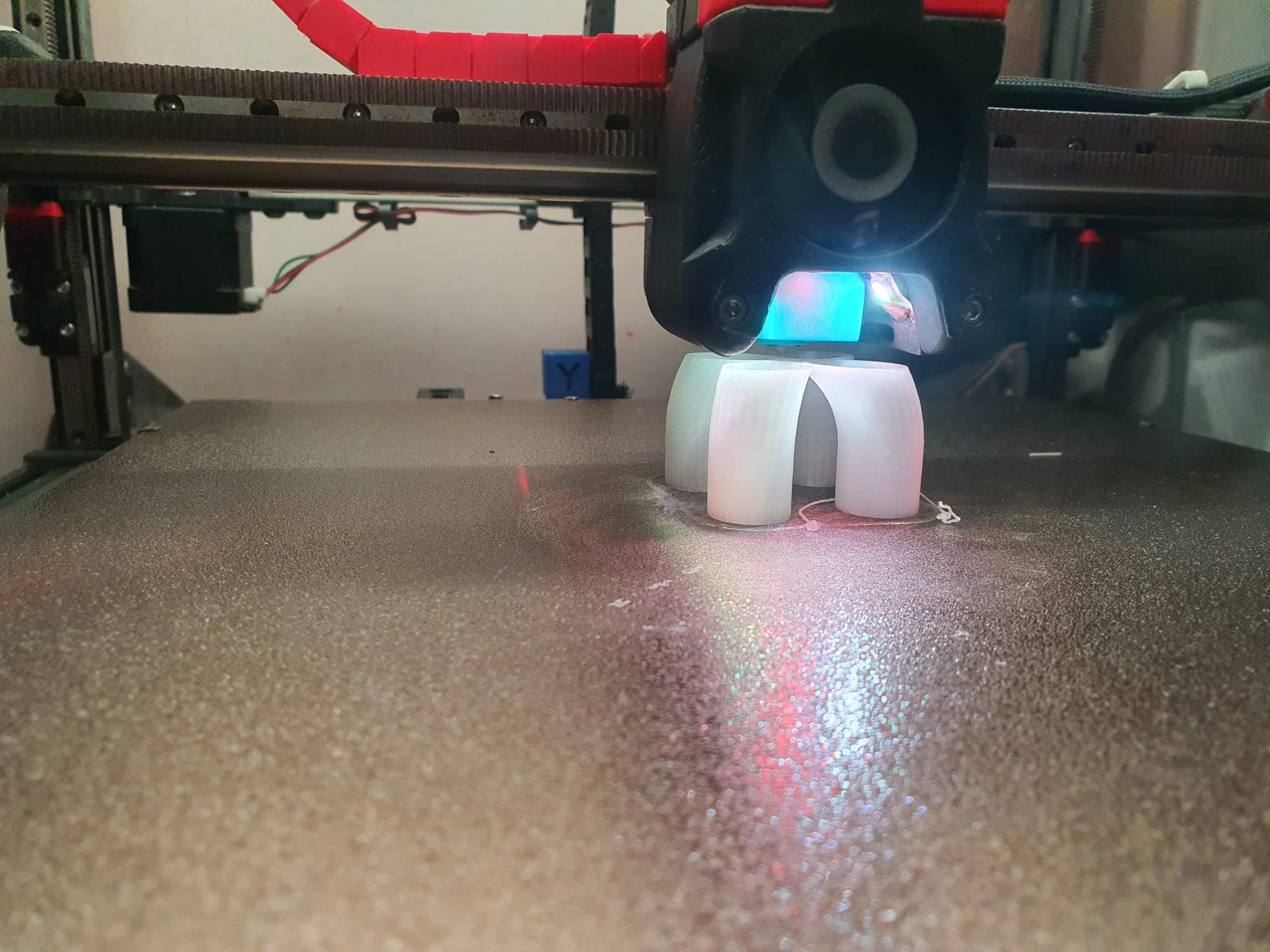
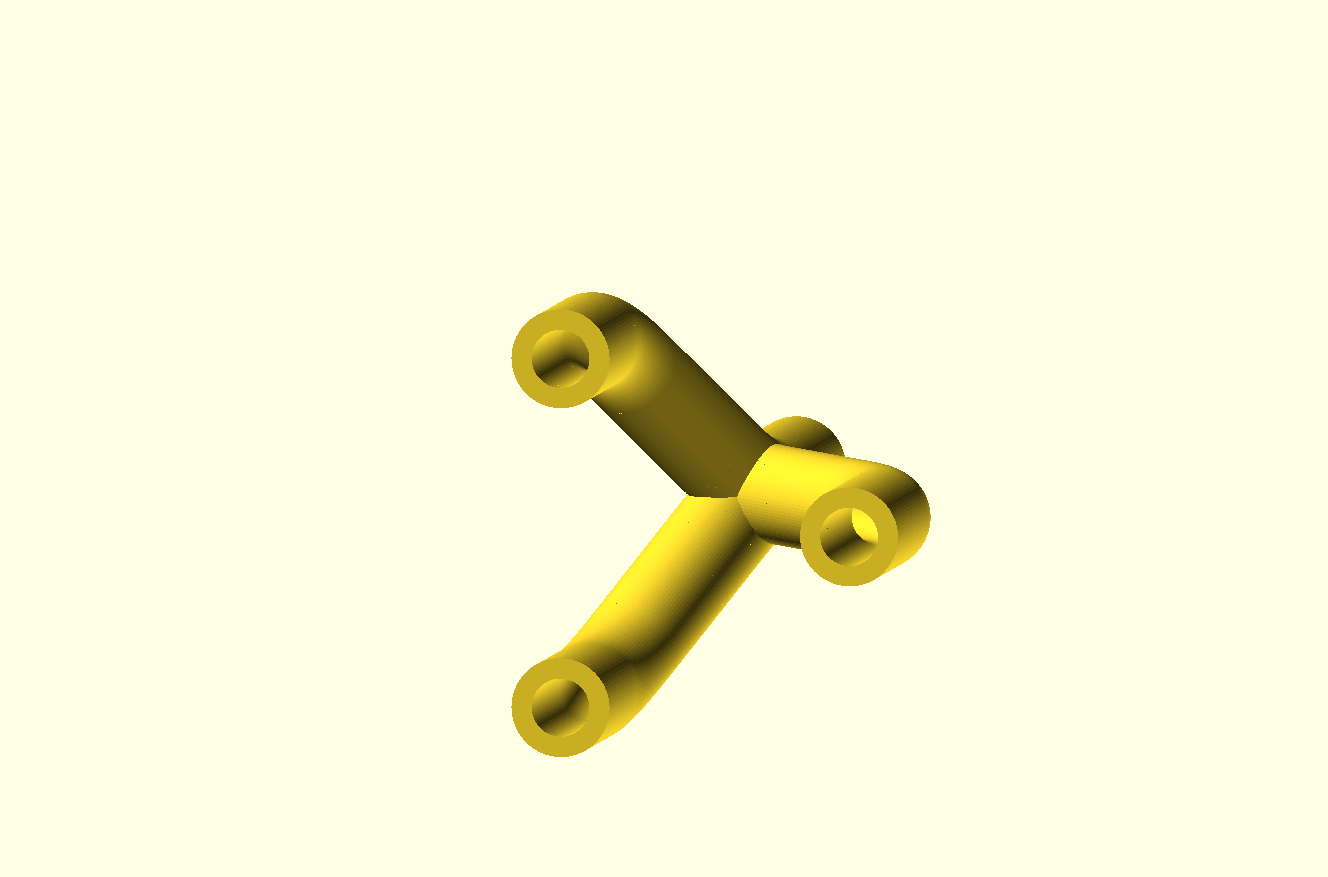
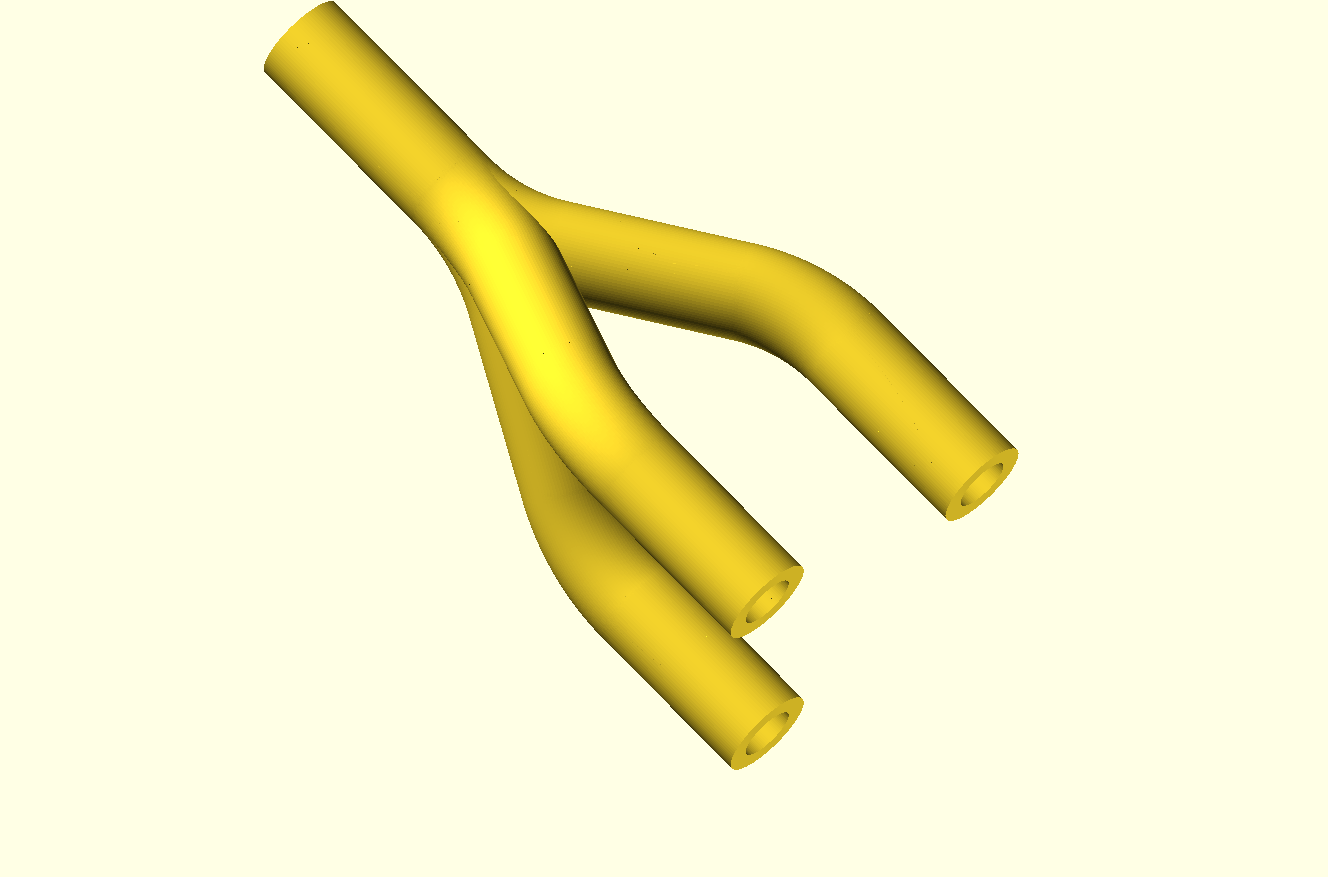
snelle draft met 0.3mm LH en 220mms/ geprint op de Voron 2.4 50% scaledin oranje ASA op de Voron 2.4 op 50% scaling2 in 1 met dikke wanden 25% scaled, ASA op Voron 2.4. en 8.5 mm buiten diameter
NB: Ik heb er voor gekozen om de 3 libs in de main code op te nemen zodat ik waar nodig nog makkelijk kan wijzigen zoals alles omzetten van child naar children.
De rechter dorpel en daarachter de dragende kokerbalk hersteld:
Roestschade rechter dorpel en daarachter ook aan de kokerbalk. Zie ook helemaal rechts de verroeste onderkant van het rechter voorscherm.
In de dorpels en in de kokerbalken alles over de hele lengte afgewerkt met de hogedruk tectylspuit met ML oplossing. (Beide kanten)Dit komt onder de kunststof afwerk/beschermstrip maar toch even in de juiste kleur gespoten.
De kokers, dorpels binnenzijde en alle open delen aan de onderkant zijn in de ML gespoten.
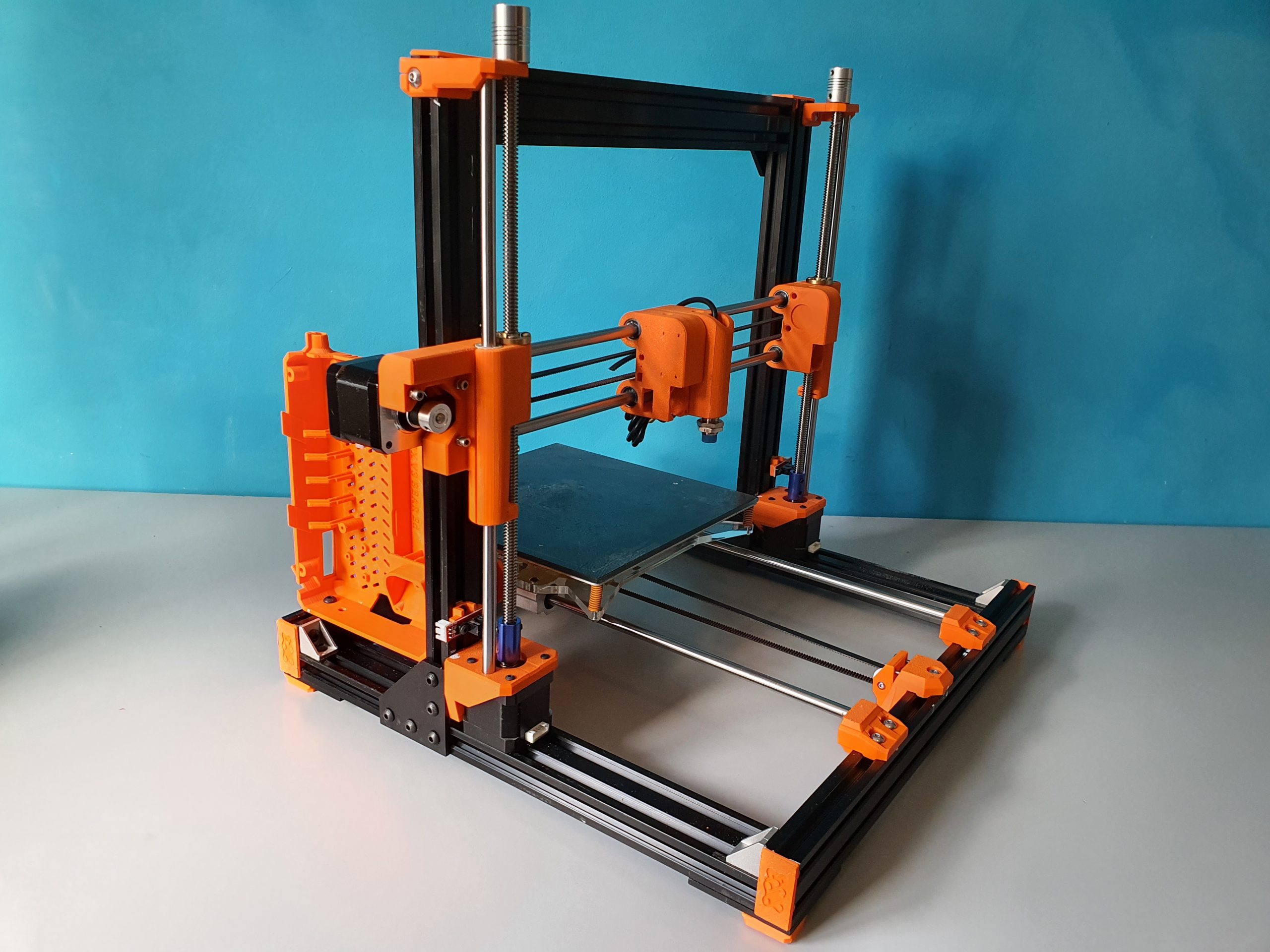
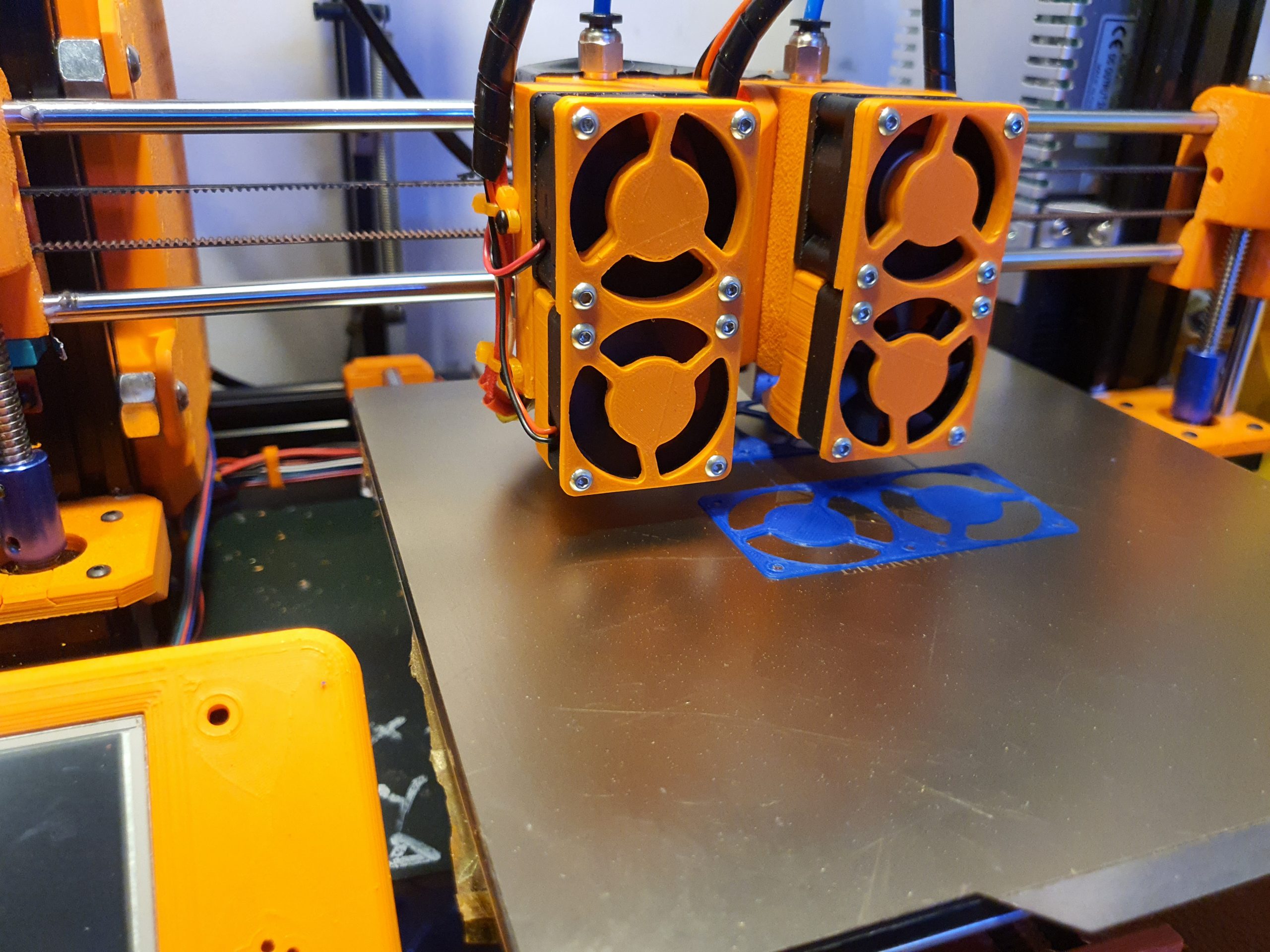
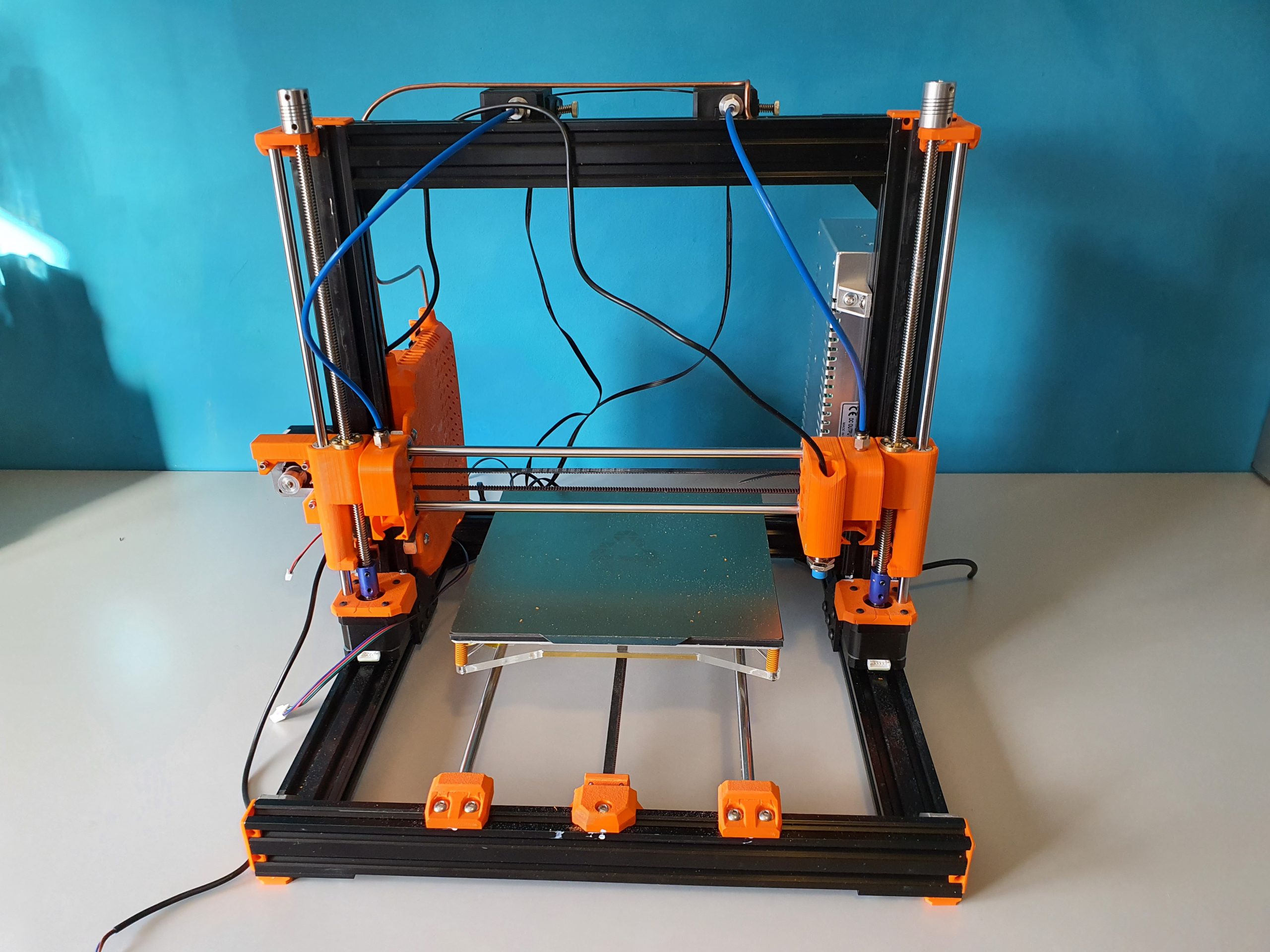
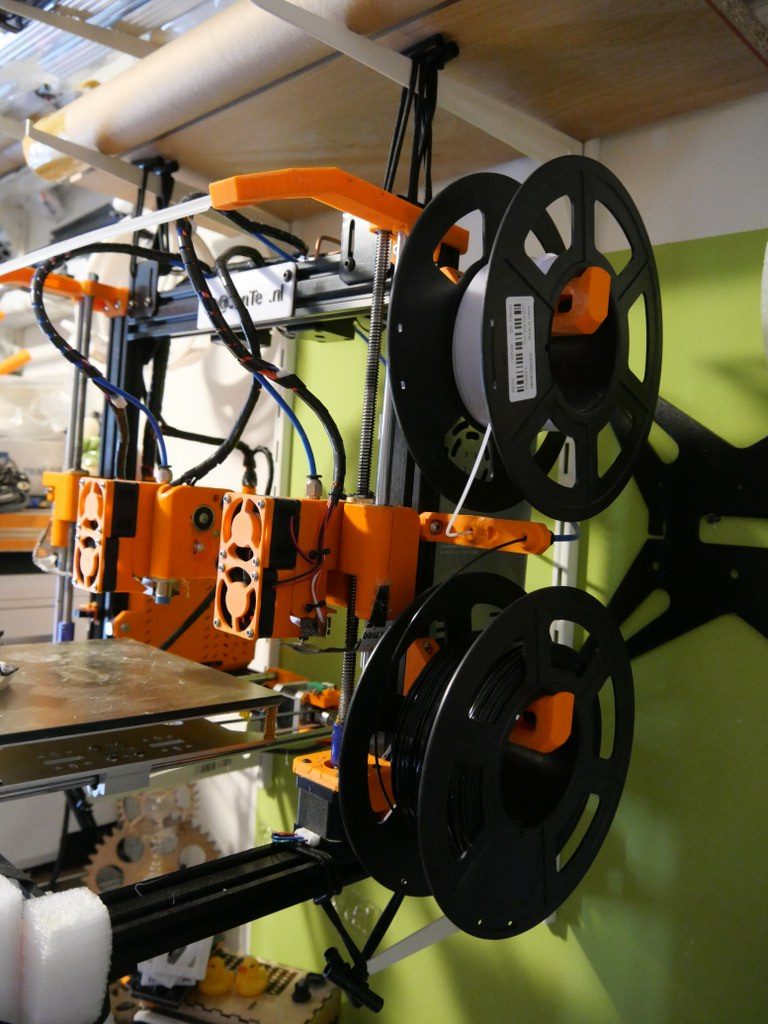
My dual carriage I3-bear based 3d printer is working very well.
On this page I share my latest configuration files, my build experiences like the used STL’s , schematics and so on.
Hope you enjoy!
Be aware that the tool settings in config.g are set including relative X, Y, Z values for this build so DO NOT put this in your slicer!
And- you need at least RRF3.3.1 for reprap FW and for DWC.
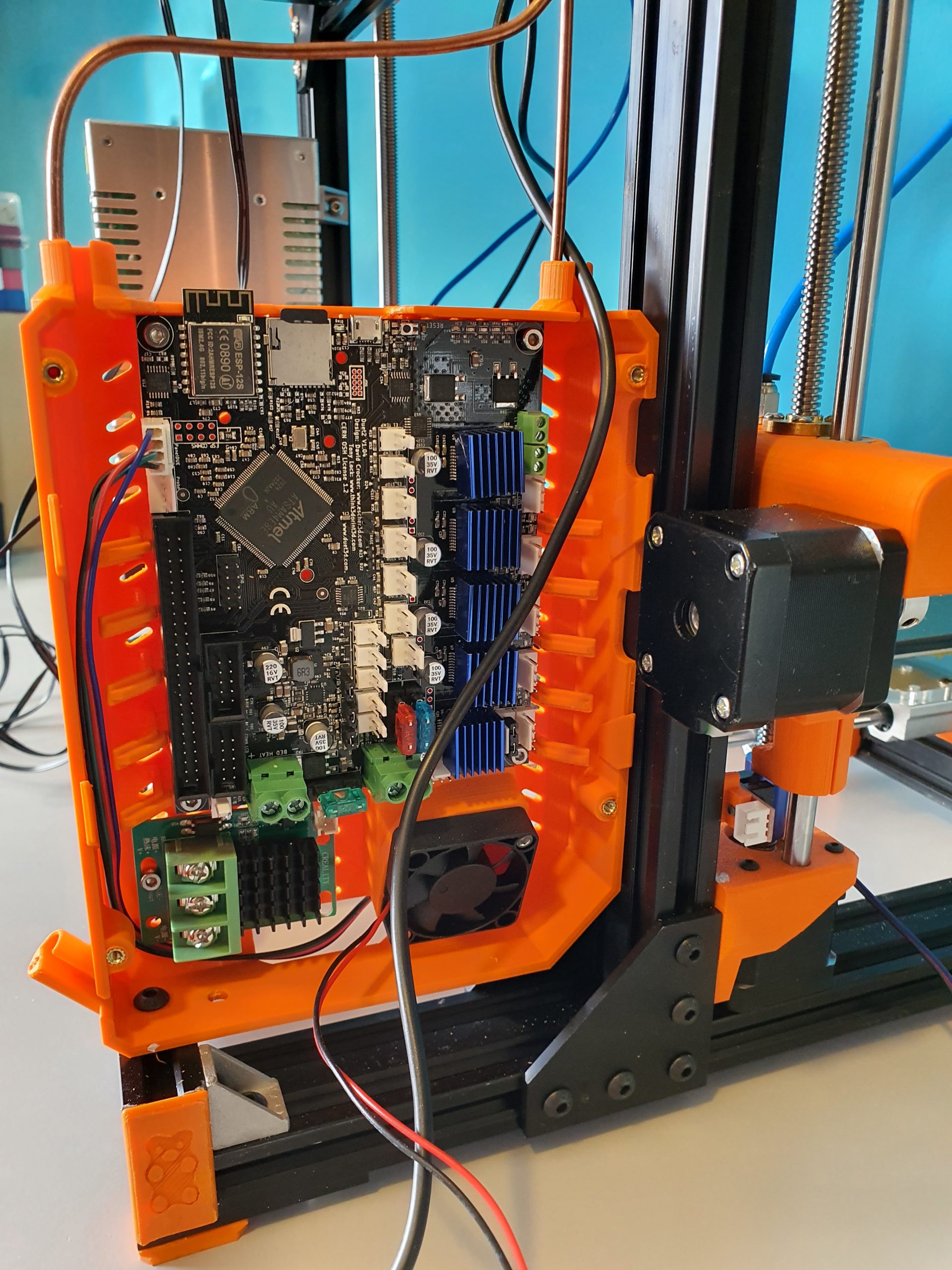
The sensorless homimg also requires knowledge of config settings and the good news is that the Duet2wifi has this all managed by the reprap firmware. No switches needed or complex jumper settings!
Tip for printing the parts: I used ABS for all parts. Use at least a printer with calibrated XYZ values for your specific filament.
Do a testcube first and apply any needed adjusting to your slicer’s settings like pre-shrinking settings of the endresult and so on.
If you don’t do this, then don’t start this build.
It is a prerequisite to get the magnetic carriage to deliver-and get the carriages from left and right of the X-axis.
Therefore the movement needs to be free of unneccessary friction.
And– if you use sensorless homing any additional friction on any sensorless homed axis might lead to unintended stalls.
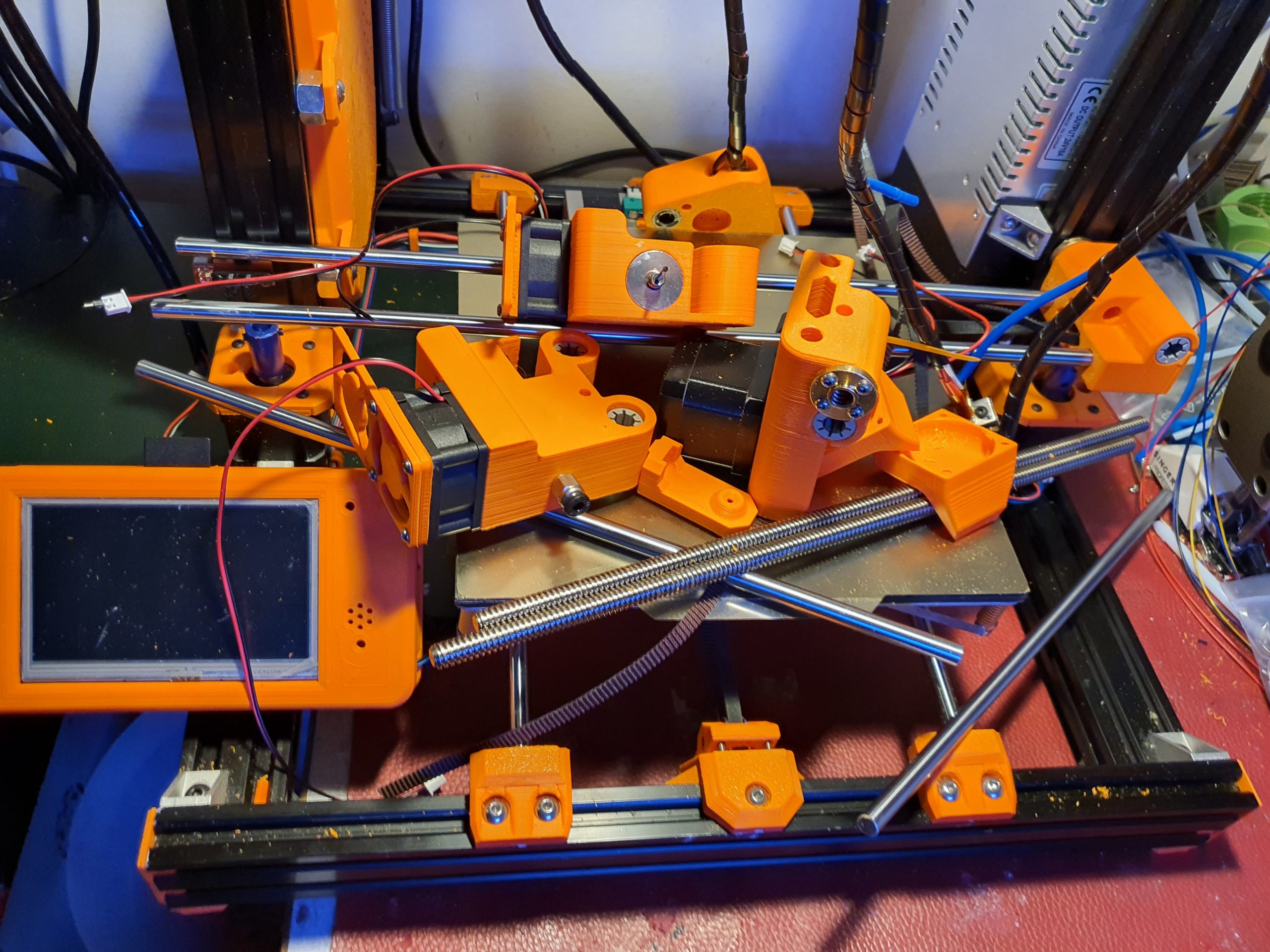
I added a dripstop to the left and right hand sided X-carriages, made of some thin tinned plate.
It is positioned so, that a little tension is put on the nozzle tip in the parking position. It really works very well!
The config.g for this build and the Duet2wifi is HERE
The Sys directory for the dual carriage build and Duet2wifi is HERE
The Macros directory for the dual carriage build and Duet2wifi is HERE
The build plan for the 2040 extrusion frame is HERE
The STL files for the X-axis carriages and carriages are HERE
All other needed STL files for the printer are HERE
The Duet’s case and 4.3 inch Paneldue’s case are HERE
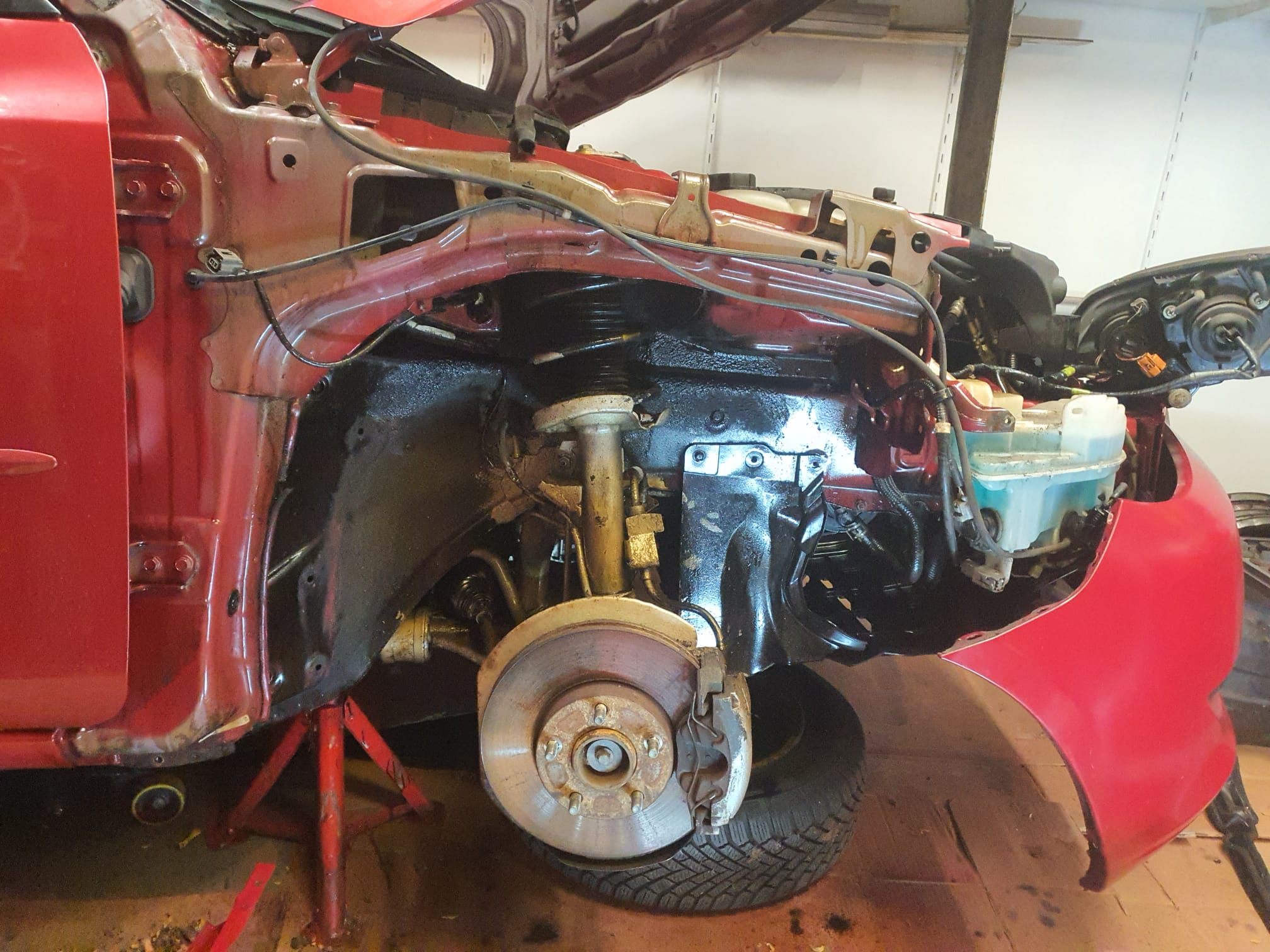
Voorschermen vervangen en in Mazda kleur A75 gezet:
Rechts op de foto zie je de onderkant van het spatbord, helemaal rot door het blad dat zich onderin ophoopt..
Wielen eraf en op de autobokken gezet.
Spatborden eraf en daarna de kokerbalk en dorpel gerepareerd (zie ander artikel)
Roestschade onderaan
Roestschade spatbordrand
Roestschade andere kant
2 nieuwe voorschermen besteld
2k epoxy etchprimer (MIPA)
2 lagen A75 (Mazda) metallic basislak. Deze droogt mat op.
Met 600 waterproof tussendoor geschuurd en gereinigd, daarna weer rode basislak
En daarna 2 lagen 2K clearcoat en een verdunde wetcoat eroverheen
2 dagen uitharden
Rechts alles in de ML gezet, ook de kokerbalken waaronder die in de motorruimte. Daarna de spatborden er op, koplampen monteren, voorbumper weer monteren, modderkuipen er weer in. Daarna de bescherm strips onder de dorpels er weer op enzovoorts.
Klaar, na het reinigen en in de was zetten van de auto.