Mijn Deltaprinter, een Geeetech Rostock 2GSpro met 2 extruders heeft eigenlijk nooit echt goed gewerkt. De op Arduino mega gebaseerde moederprint is langzaam en als gevolg van de calculaties die het board steeds uitvoert door het vertalen van de G-codes naar besturing van de ABC motoren, lijt het allemaal net niet te lukken.
Prints zijn rafelig en aan de hardware lijkt het niet te liggen.
Voor deze printer heb ik een Duet wifi V1.04 motherboard besteld, dezelfde die ik voor de Prusa Bear installeer. Met een 4.3.inch touchscreen erbij. Zie de bouw van deze upgrade HIER:
Het installeren zal weinig problemen opleveren, de print gaat onder de printer net zoals het bestaande GT2560 board en ik schakel dan gelijk over van Arduino (en Marlin) naar reprap software. Kwestie van smaak, maar Marlin en Arduino is erg traag bij elke update terwijl ik met bijvoorbeeld Smoothieware en een lokale config file veel snellere veranderingen en dus ook uploads kan doen.
Juni 2020 ben ik, op basis van alle ervaringen met de 3d printers en laser cutters, een eigen ontwerp gaan maken voor een klein model 3d-printer. uiteindelijk heb ik gekozen voor de Prusa Bear uitvoering, waarin ik alle verbeteringen gelijk meeneem.
Dus wel de 8mm rods voor X, Y en Z bewegingen maar ook het rigid frame met 2040 extrusie aluminium profiel.
Een 24 Volts voeding, hotbed en extruder en een Duet wifi motherboard met touchscreen bediening.
En ik maak m gelijk lekker stil. Geen jankende fans en geen jankende stappenmotoren.
Eerst het frame aangeschaft, daarna alle printable delen in PetG geprint op de Ender 3:
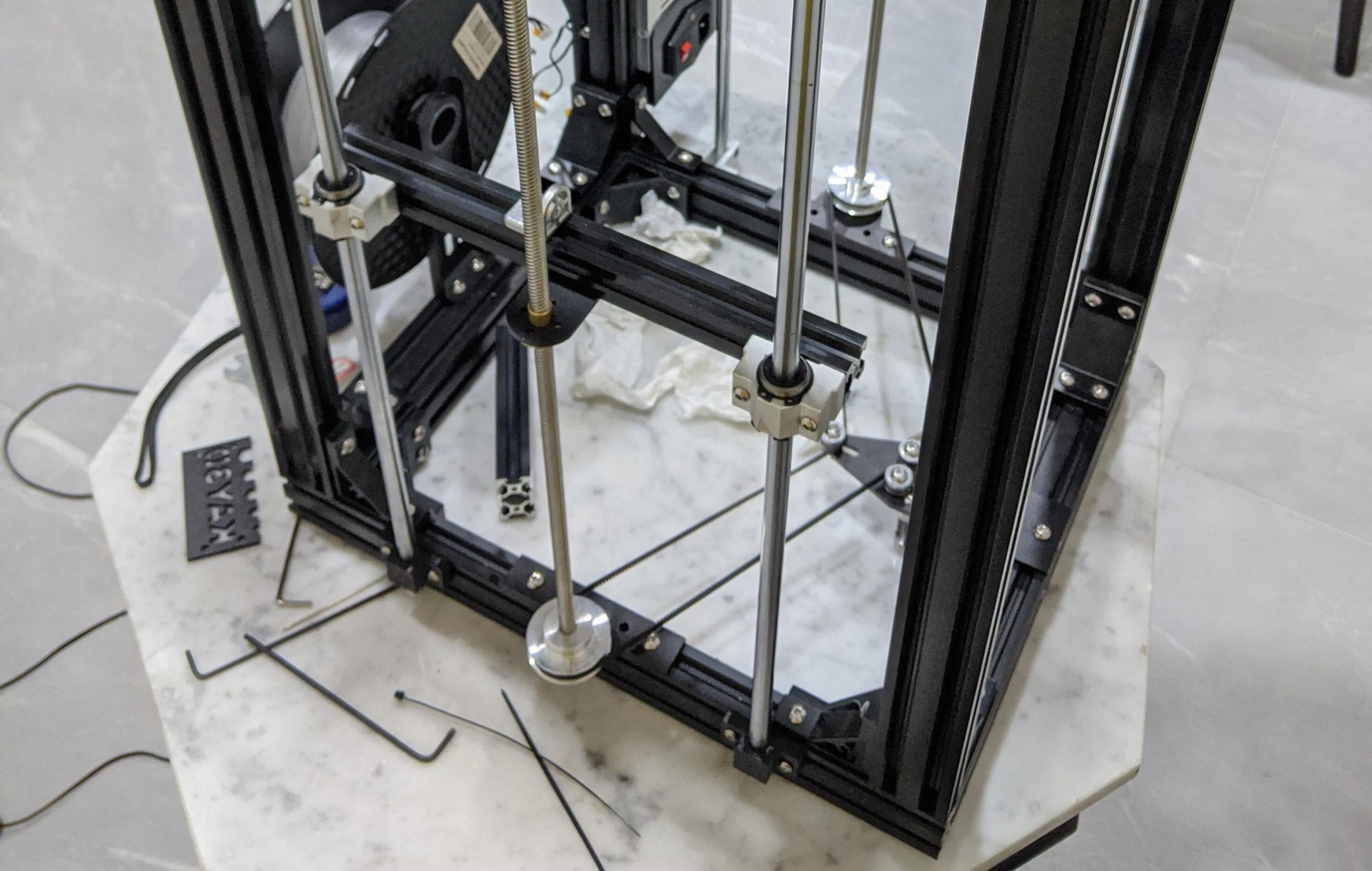
Boven: Frame in elkaar gezet en de eerste delen gemonteerd (1-7-2020)
Onder: Alles gemonteerd (midden juli 2020), glasbed erop en eerste testprints gemaakt. Ben nog niet tevreden over de (on)gelijkloop van beide Z motors. De Duett kan ze apart aansturen en dan moet ik eerst nog even 2 endstops maken op de Z assen, en strak gelijk maken. Het worden optical stops vanwege de goede repeatability. Dan kan ik homen en aslevelen op de endstops en bedlevelen met de BLtouch probe. Weet even niet hoe dat in het NL heet, -).
Mijn wens is om naast de bestaande printers een 3Dprinter te maken met een extra groot werkoppervlak. Daarmee wil ik onder andere een paar gootstukken en onderdelen voor de blower van de airco in een oude auto printen.
Ondertussen heb ik heel wat verschillende 3d-printers (na-) gebouwd, hier en daar met delen van andere printers of met aanpassingen naar eigen inzicht en ervaring.
De beschrijvingen daarvan zijn in het Engels gemaakt en kun je HIER op mijn website vinden.
Mijn ervaringen met CoreXY printers zijn uitstekend vanwege de grote nauwkeurigheid en hoge printsnelheid, zodat ik dit type heb gekozen voor mijn gewenste printformaat van 500x500x500 mm.
Het wordt een stille printer met 3 extruders voor 3 soorten/kleuren filament (gelijktijdig of apart) en 1 nozzle.
Alle benodigde materialen zijn op voorraad, en het belangrijkste is de keuze voor de definitieve opzet van de printer.
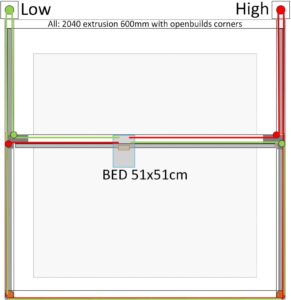
Omdat ik een zo klein mogelijke printer wil hebben ondanks de grote printmaat zijn de keuzes qua bouw behoorlijk beperkt. De volgende uitgangspunten zijn leidend bij de bouw:
Te gebruiken extrusie-materiaal is aluminium type 2040 van max 60cm lang, deze heb ik voldoende op voorraad;
Kast moet eenvoudig gesloten kunnen worden gemaakt, dus niet teveel delen die buiten de extrusie steken;
De X-Y Gantry is vast gemonteerd bovenin de printer en beweegt niet op de Z-as;
Voor de Y-as worden 2 lineaire rails MGN9H van 60cm lang gebruikt;
Voor de X-as wordt 1 lineaire rail MGN12H van 60 cm lang gebruikt;
Het bed is bewegend op de Z-as en gelagerd met LUU 8 mm bussen op 4 stuks ‘rods’van 8mm;
De X- en Y motoren zijn buiten de framehoeken geplaatst voor maximale X- en Y uitslag (breedte en lengte van de beweging van het hotend);
Er is 1 Z-motor die via één closed loop belt beide schroefassen aandrijft voor de Z-beweging van het bed;
Er komt een triple hotend in, luchtgekoeld met 3 bowden extruders en 1 gezamenlijke nozzle;
Voor het besturingsdeel heb ik een bestaand Duet wifi board gekozen. Daar moet nog wel een DUEX uitbreidingsboard bijkomen voor de extra extruders.
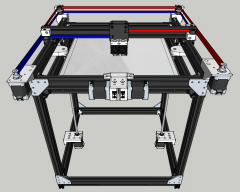
Voorbeeld voor de onderkant en Z-as aandrijving (van een Ender3-ombouw naar CoreXY):
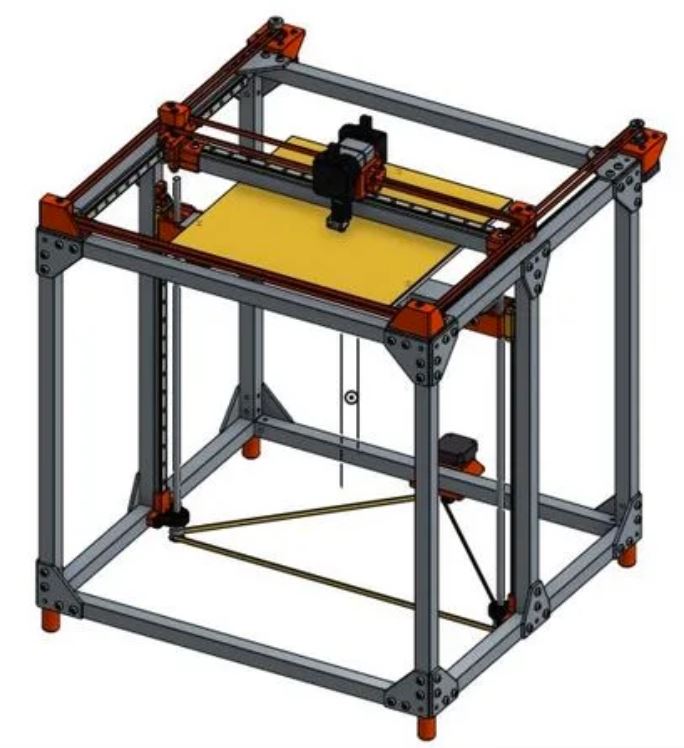
Voorbeeld motorplaatsing bij een H-BOT gantry:
en bij een CoreXY met rods ipv linear rails:
En nog een voobeeld met linear rails maar dan aan de binnenkant van de Y-legs.
Mijn ontwerp: Ik wil de Y-rails bovenop plaatsen zodat er meer schuifruimte komt voor de X-as en het hotend in zijwaartse richting. De X-as komt aan de zijkant zodat er maximale ruimte komt tussen beide Y-extrusies. Theoretisch krijg je dan een kastbreedte van 500 mm (gewenste bruikbare bedbreedte) plus 5cm (de breedte van het hotend) plus 4 cm (2 maal extrusiebreedte), samen 590 mm, afgerond 60 cm. Omdat ik openbuild corners van 2x2cm gebruik is de breedte gelijk aan de diepte bij gebruik van 60cm extrusie 60+ (2x2cm)=64 cm. De hoogte is dan 60cm+ (2×4) =68cm.
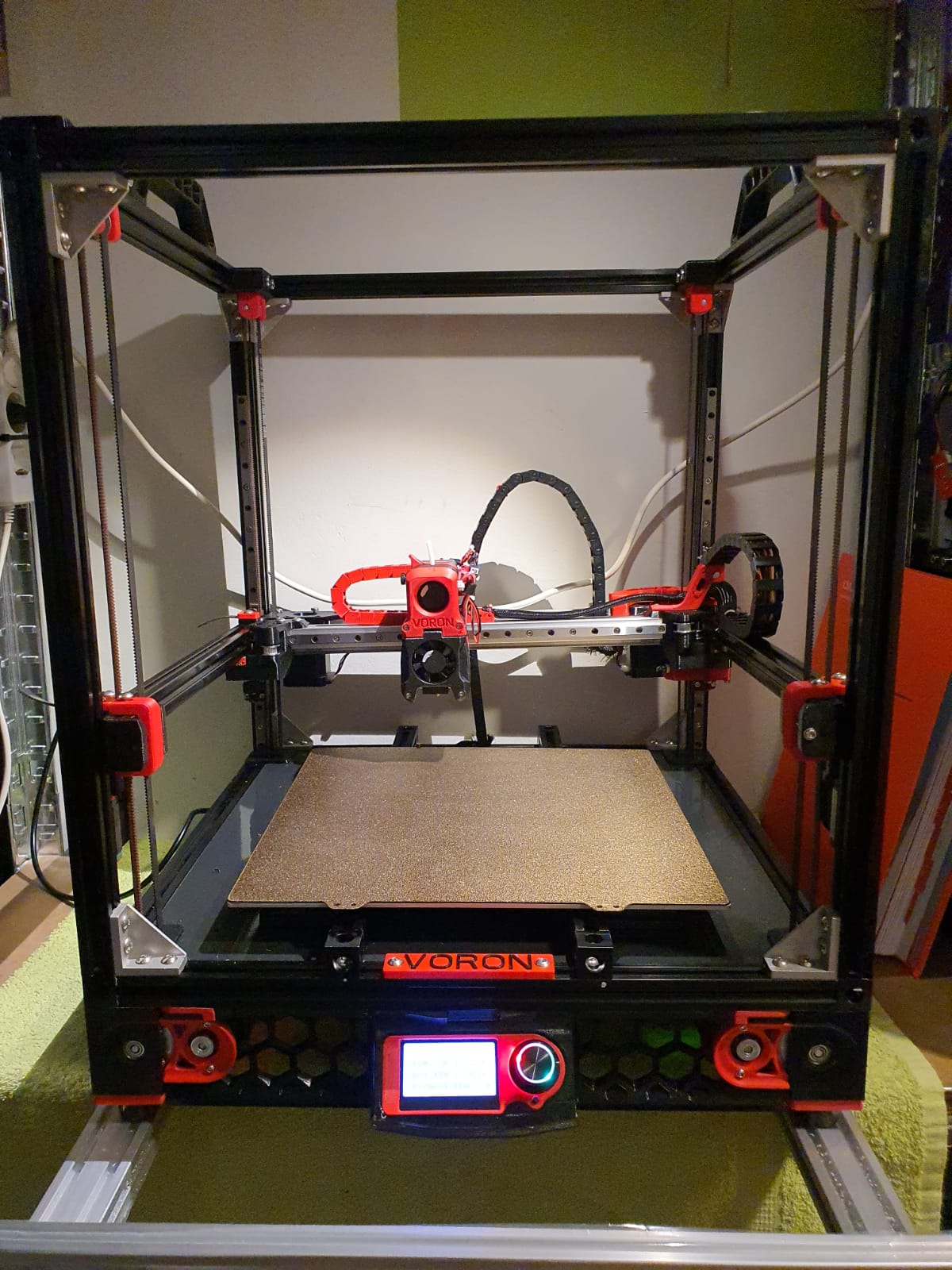
Mijn ervaringen met CoreXY printers zijn uitstekend, zodat ik voor mijn zelfbouw COREXY printer een VORON heb gekozen met een printformaat van 300x300x300 mm.
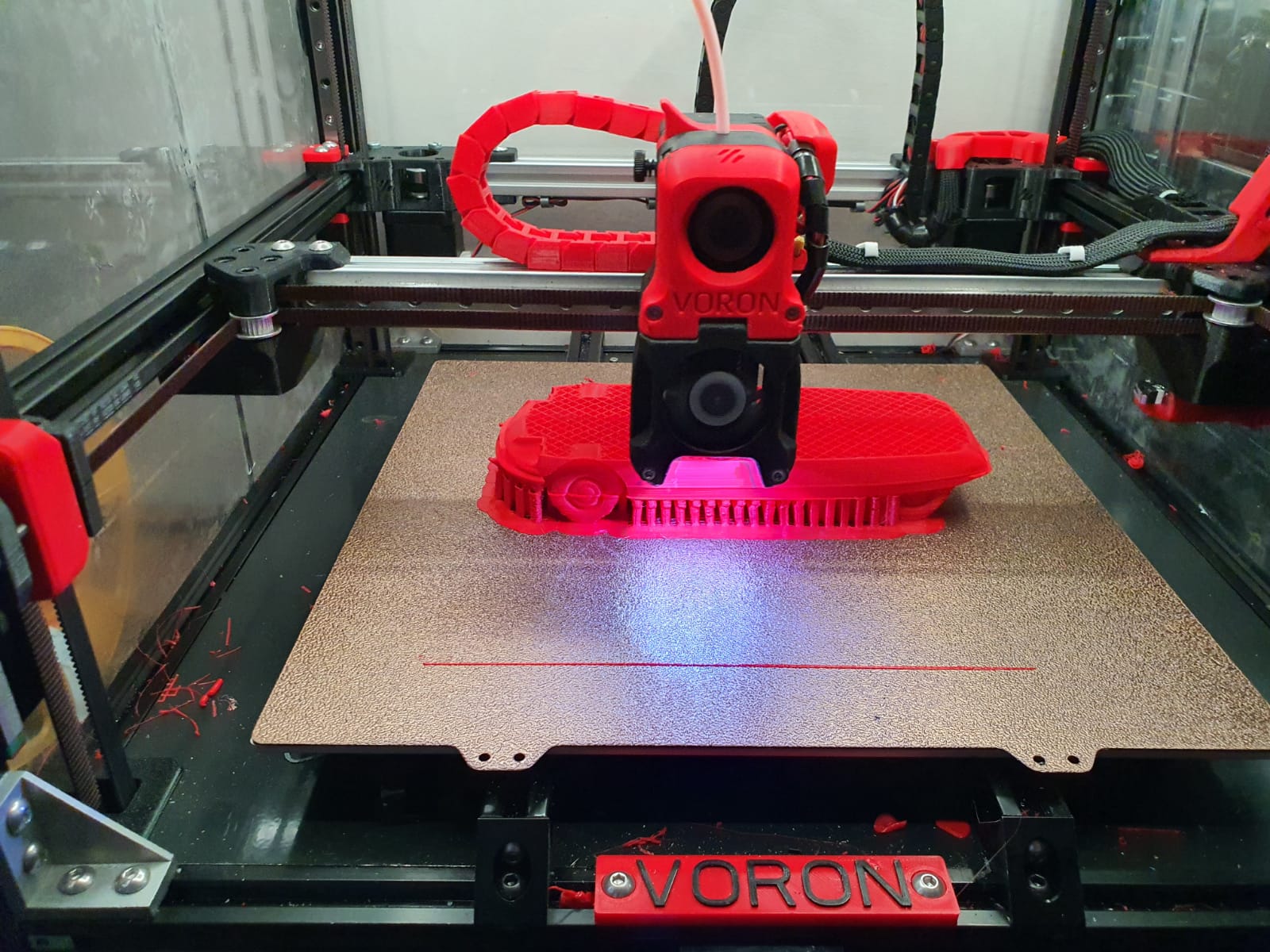
Sample PLA print with a Citroen DS at 175 mm/s print speed
De VORON is vanuit een grote community ontwikkeld en is een van de beste en meest betrouwbare 3Dprinters. En deze printer ziet er gewoon erg goed uit!
Via AliExpress, Banggood, Reichelt, aluminiumopmaat.nl en plexiglas.nl heb ik alle spullen besteld, conform de bill of materials die ik kon downloaden vanaf de VORON site.
De PETG delen heb ik op de Prusa mini op 0,15 fine geprint
De ABS delen (rood en zwart) zijn geprint op de Twotrees Sapphire plus. Was wel heel wat ‘tweeken’ voor het ABS er goed uit kwam maar uiteindelijk een mooi resultaat!
Printed parts for the Voron 2.4 300
Uiteindelijk is nabouwen geen echte zelfbouw en is het toch meer gebaseerd op bestellen en in elkaar zetten dan zelf met de zaag en boormachine aan de gang zijn. Ook de benodigde 8(!) lineare rails van 350mm, lagers, tandwielen, riemen, motoren, electronica enzovoorts is besteld en de rest van de benodigde spullen is inmiddels (25-8-2020) geprint.
Voor het besturingsdeel heb ik één PI Raspberry PI 4B 4GB en twee stuks SKR 1,4 turbo motherboards gekozen, conform de VORON aanbeveling.
Het bouwen van de Voron 2.4 met de afterburner Beta1 hotend combinatie is d.m.v. de volgende foto’s in beeld gebracht.
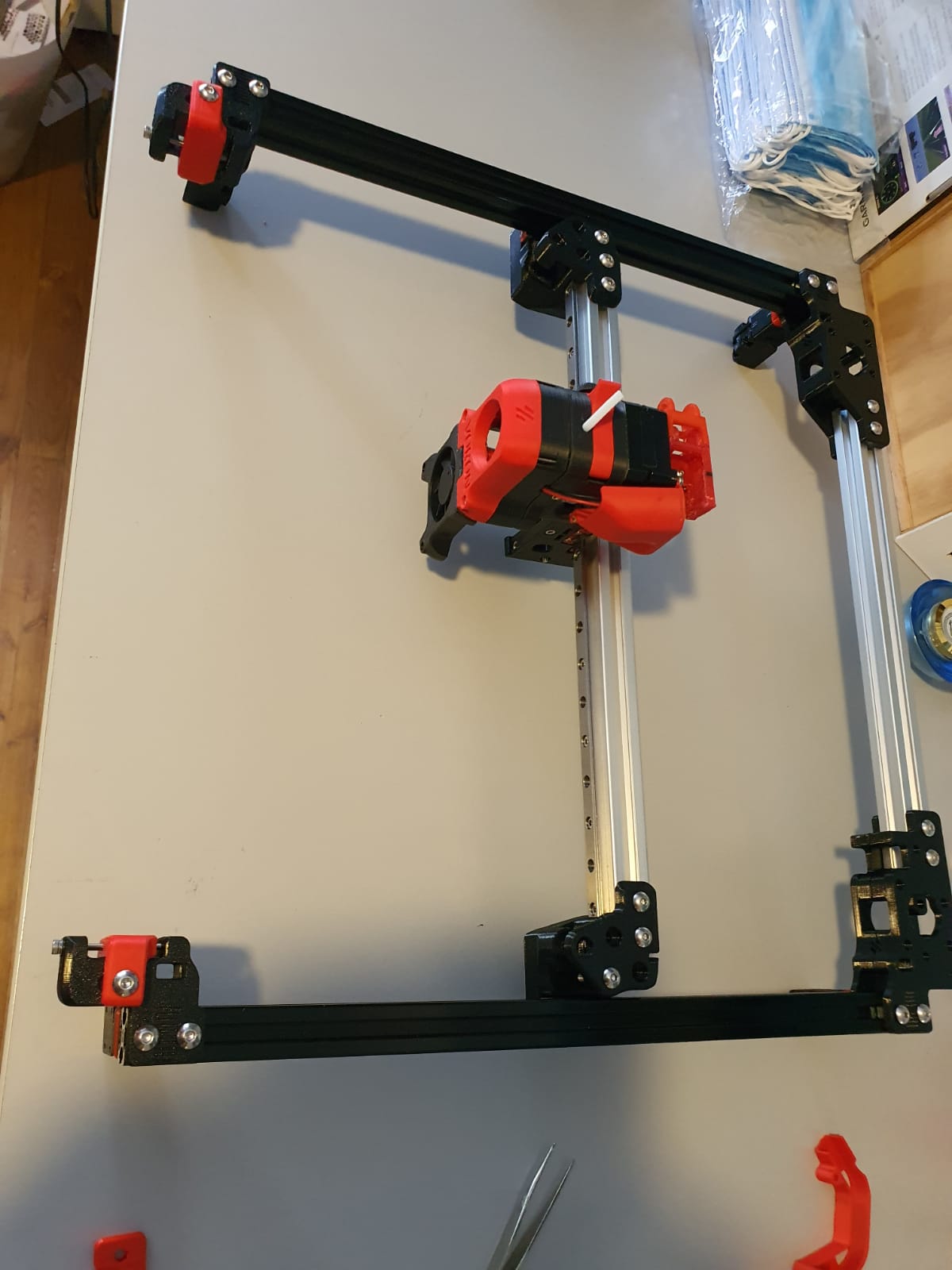
Gantry gereed:
Gantry of my Voron 2.4 300
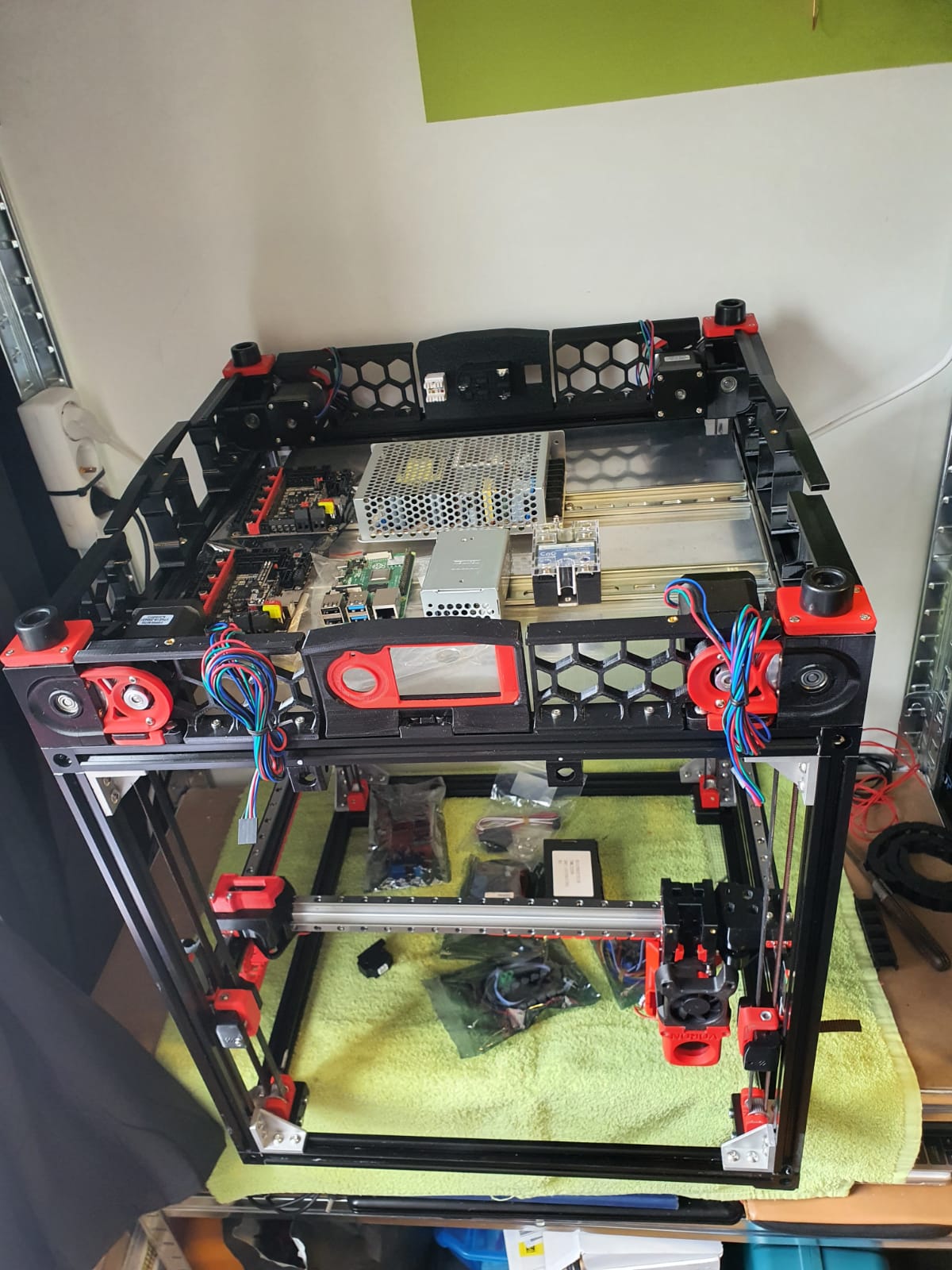
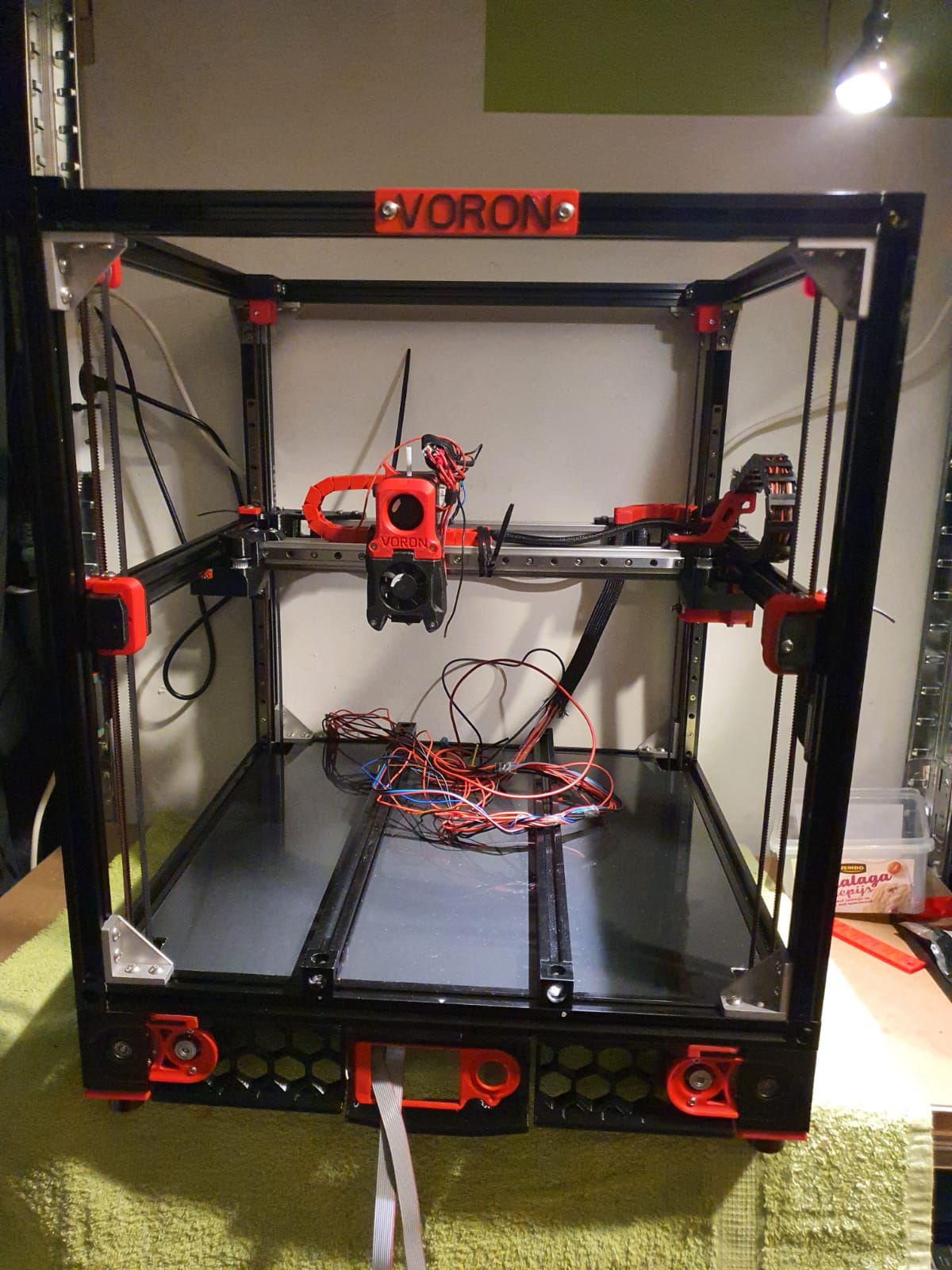
Behuizing en skirts onderzijde met Z-motors nog zonder de gantry gemonteerd:
Frame of my Voron 2.4 300Electronics positioning underneath my Voron 2.4 300
Onder: De 9 mm aandrijfriemen van de 4 Z-assen geplaatst:
Halfway the building phase of my Voron 2.4 300
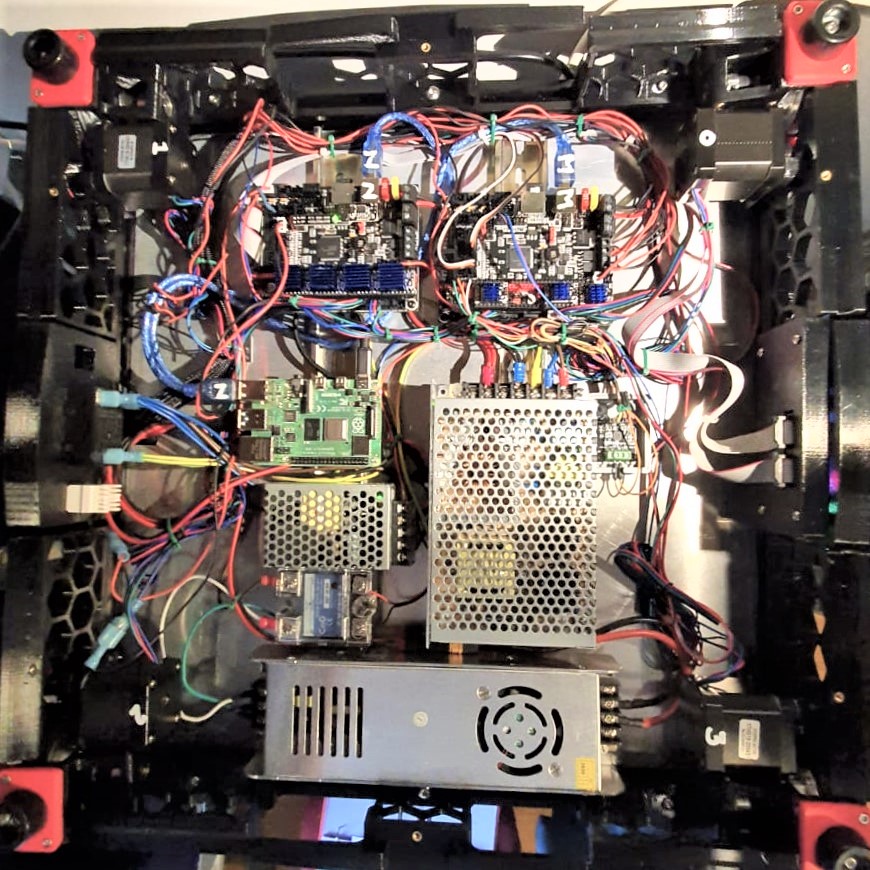
En de basisplaat met de rails en besturing, voedingen enzovoorts gemonteerd (printer omgedraaid):
Cabling and electronics of my Voron 2.4 3000: 2xSKR1.4 turbo with Klipper, Raspberry PI and Octoprint with Klipper
Het wachten is nog op de lagers voor de Alpha-en Beta aandrijving in de gantry. Met deze lagers wordt per 2 stuks steeds een spanrol gemaakt. Hiervoor had ik oorspronkelijk spanrol lagers aangeschaft, maar de diameter van de kraag van deze lagers is net te groot.
Jammer maar dan maar even aan de Raspberry PI4B werken, in combinatie met 2 maal SKR V1.4 turbo motherboards. De PI gaat via Klipper een nieuwe config.bin maken voor de SKR V1.4 motherboards zodat de PI beide SKR boards tegelijk kan aansturen. Op het mainboard komen Alpha en Beta en de extruder plus de extruder heater, op het andere (Z)board de 4 Z-motoren en bed heater. Op zich had een Duet met expansion board ook een optie kunnen zijn, maar de Voron ontwerpers hebben het met de PI, Klipper en 2 SKR boards gemaakt. En ik probeer zo dicht mogelijk bij het ontwerp te blijven . -)
Onder: Inrijgen van de riemen, geen plaatje gebruikt. Gewoon ergens beginnen en je komt vanzelf goed uit. O ja, ook in de config nog even de sensor gewisseld van NC naar NO..
Onder: Naast het 24Volt 200 Watt hotbed toch ook het 500 Watt 230V erbij geplaatst. Het opwarmen duurde met enkel de 24V versie meer dan 20 minuten om tot 110 graden Celsius te komen…
Oud:
En nieuw: (nog geen PID run gedaan …-))
Onder: En gelijk ook de stalen plaat geplaatst, met magneetvel eronder.
Onder: Eerste print.. Was nog wel even zoeken naar de Z offset afstelling en de extruder draaide verkeerd om. Ook de gantry levelen was even nadenken, je moet eigenlijk de basisinstelling eerst even met een maatlatje maken, anders duurt het vereffenen wel heel lang. Mooi is dat een bed mesh leveling daarna niet meer hoeft, maar natuurlijk wel kan. Je draait een home en doordat de nozzle altijd de Z op de mechanische Z endstop ijkt, en de gantry alle vereffening doet heb je altijd een goede eerste laag. Tenzij het bed warpt maar met zo’n dikke plaat lijkt dat bijna niet mogelijk. Voor de zekerheid heb ik wel een bed_mesh profiel in de config.g opgenomen. By the way heb ik gewoon een 24 V aluminium hotbed als basis gebruikt omdat mijn 8 mm 310×310 plaat een geknipte plaat bleek te zijn in plaats van gezaagd. En een geknipte plaat blijkt standaard al aan de geknipte zijden niet vlak te zijn, helaas.. Vlakken kost meer dan een nieuwe plaat, dat komt misschien nog wel een keer…
Nawoord:
In de praktijk heb ik nog een paar kleine minpuntjes opgelost, waaronder:
Extruder tunen. De donor extruder bleek het filament niet goed op te pakken.
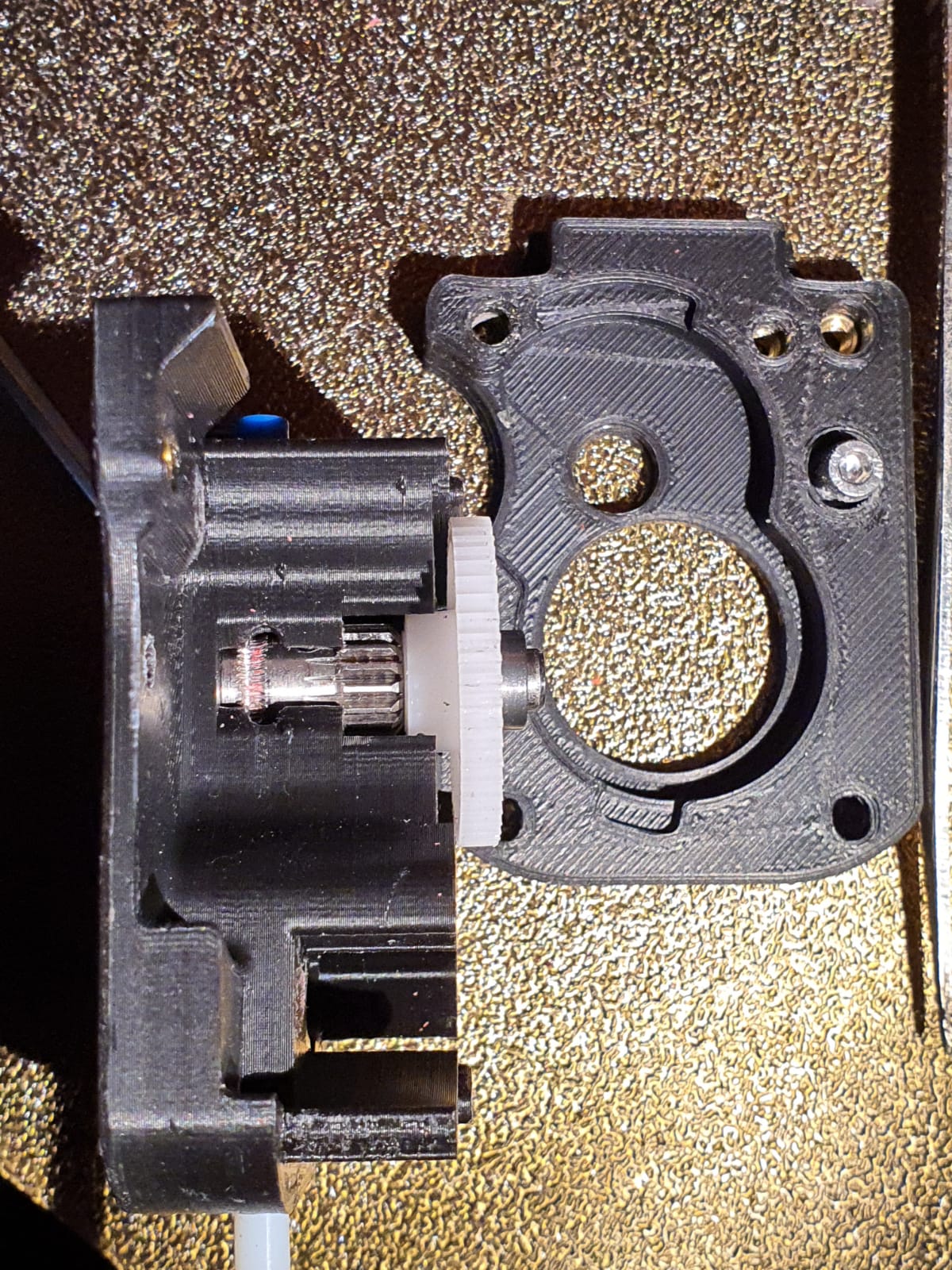
Eerst nog geprobeerd een ringetje links op de as ertussen te plaatsen, maar dan komt het nylon tandwiel rechts helemaal strak te zitten en kan de behuizng niet meer helemaal dicht….
Ik heb uiteindelijk een spare setje dual drive extruder tandwielen gebruikt en de set tandwielen verwisseld. Daarmee was het filament goed in lijn met het looppad van de tandwielen. Zie de foto van hoe het eerst zat:
Misaligned filament path in Afterburner extruder
Hotend tunen
Na de PID runs van hotend en heated bed bleek mijn gekozen samenstel van het aangepaste ED6 heater block, de heatbreak pipe en het koelelement niet goed op elkaar aan te sluiten. Resultaat was dat bij een extractie van het filament steeds een diks stuk aan het eind vastzat. Dat werd veroorzaakt doordat de heatbreak pipe niet strak aansloot op de nozzle. Daar mag geen speling tussen zitten. Alles helemaal gedementeerd en de heatbreak pipe 2 slagen minder ver in het koelelement gedraaid met rode threadlocker. Dagje laten harden en daarna de rest gemonteerd. By the way heb ik ook gelijk de teflon versie van de heatbreak pipe gemonteerd in plaats van de titanium versie. De tintanium versie was naar mijn ervaring toch een beetje te stroef. Of mijn filament was te oud of inferieur. In ieder geval werkt alles na de aanpassing zonder problemen.
Hotbed, TPU en ABS
Om TPU en ABS zonder brim of skirt zonder warping te printen heb ik een magnetisch PEI stalen plaat gekocht met grof profiel. Dat werkt echt perfect. Zowel ABS met 110 graden blijft mooi zitten en met TPU op kamertemperatuur blijft het ook mooi plakken. En het verwijderen gaat ook zonder problemen. Af en toe spuit ik een klein beetje haarlak op de plaat maar ik denk dat die lak eigenlijk helemaal niet nodig is. Het is bedoeld om het verwijderen gemakkelijker te maken.
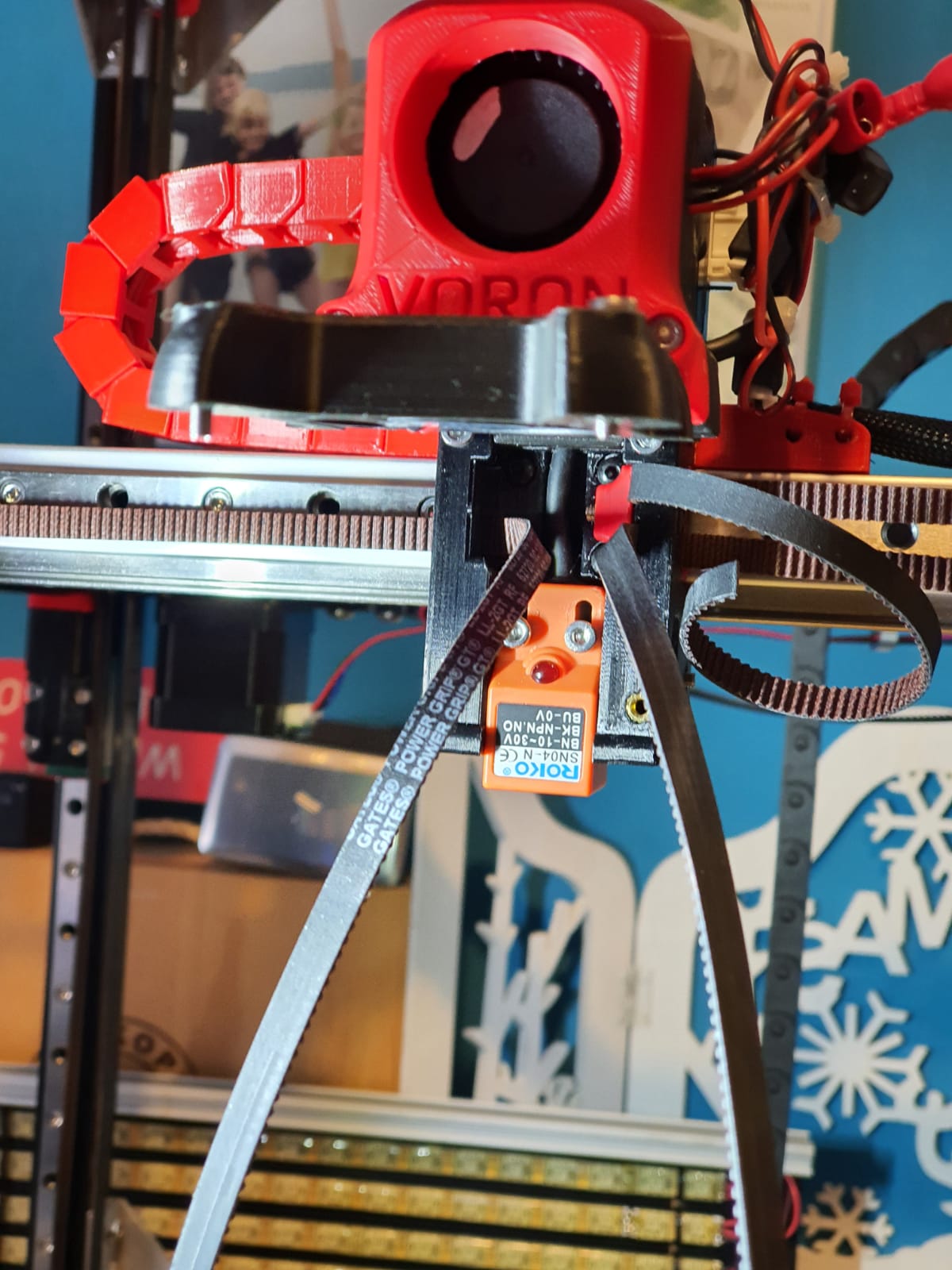
Tension of the belts
I tried getting the belts at the same tension, this was not that easy. Finally I ended up with a mechanical way of measuring tension after putting 1 at my desired tension and comparing this as reference with the other to be compared belts. So, for the Alpha and Beta belts I first did a ‘good feeling’ setting and then I used my old trunk scale weight device to measure the tension when pulling the belt A. Then, I used the device to measure at the same place for B. And I repeated this for the 4 vertical belts.
Uitlijning
De machine uitlijnen is ook nog wel een dingetje…
Je moet er van uitgaan dat je frame haaks en recht is. Dat moet je terdege checken. Zowel verticaal, horizontaal als diagonaal. Daarna kun je de gantry stellen. Maak de A en B belts los en verwijder ze. Of doe de uitlijning VOOR het plaatsen van de belts.
Fixeer de horizontale positie van de Gantry anders kun je helemaal niets uitlijnen. Plaats 4 gelijke afstandsblokjes van ca. 10-15 cm onder de sliders van de verticale linear rails op de onderste 2020 profielen, in de 4 hoeken waardoor de gantry stabiel rust. Ik heb onder alle verticale MGN9 linear rails achteraf nog positiehouders geplaatst zodat de rails niet in het 20×20 V profiel kunnen schuiven. Als je ‘gewone’ 20×20 extrusieprofiel gebruikt heb je geen probleem, omdat er genoeg ‘vlees’ overblijft voor de bevestiging van je raild op het profiel. Bij V-profiel is de groef iets breder en is het erg moeilijk om zonder hulpmiddelen in de groef de rails netjes te monteren. Mijn frame is van V-rail profiel en de gantry van gewoon 2020 profiel.
Het uitlijnen van de gantry ben ik aan de achterkant gestart. Alle schroeven een beetje lossen, ook de schroeven van de bolle connectors waarmee de gantry vast zit aan de linear rails. Overigens zie ik bij sommige bouwers dat deze schroeven met meerdere veerringen zijn geplaatst. Ga ik ook doen…
Aan de achterkant van de gantry duw je de gantry volledig tegen de achterkant aan. Er mag geen ruimte zitten tussen de XY joints en het frame. PS: Laat de endstops er nog even af bij deze actie!
Zet terwijl de gantry tegen de achterkant aanzit de XY joints vast en de sliders van de X- as ook. (de kant van de endstops holder dus tijdelijk maar even met 2 schroeven)
Zet de achterste 2 gantry joints (met de bolle vlakken) ook vast. Hiermee is de achterste positie haaks gefixeerd.
Schuif de gantry voorzichtig naar voren. Dit moet zonder enige moeite kunnen. Zo niet, check of er voldoende speling is (en schroef als nodig iets los) op de gantry joints aan de voorzijde (met de bolle vlakken). Als je desondanks nog steeds geen vrije loop naar voren hebt is je frame niet goed of zitten je verticale rails niet goed. Check eerst de juiste plaatsing van je rails met je positietool (uit de geprinte voorraad) en schroef voor de zekerheid ook de 4 schroefjes aan beide voorste verticale rails los.. Probeer weer of het schuiven van de gantry soepel gaat. Nog steeds niet goed? Draai dan de procedure om en begin aan de voorkant. Probeer de gantry exact level te zetten met het frame.
Na het stellen: Test de uitlijning ook halverwege (verticaal) en bovenin!